Modèle de situation de type "prédateur-proie"
Considérons un modèle mathématique de la dynamique de la coexistence de deux espèces biologiques (populations) interagissant entre elles selon le type "prédateur-proie" (loups et lapins, brochets et carassins, etc.), appelé le Voltaire- Modèle Lotka. Il a d'abord été obtenu par A. Lotka (1925), et un peu plus tard, et indépendamment de Lotka, des modèles similaires et plus complexes ont été développés par le mathématicien italien V. Volterra (1926), dont les travaux ont en fait jeté les bases de la soi- appelée écologie mathématique.
Supposons qu'il y ait deux espèces biologiques qui vivent ensemble dans un environnement isolé. Cela suppose :
- 1. La victime peut trouver suffisamment de nourriture pour vivre ;
- 2. A chaque rencontre de la victime avec le prédateur, ce dernier tue la victime.
Pour plus de précision, nous les appellerons carassins et brochets. Laisser
l'état du système est déterminé par les grandeurs x(t) et y(t)- le nombre de carassins et brochets en ce moment G. Pour obtenir des équations mathématiques qui décrivent approximativement la dynamique (évolution dans le temps) de la population, nous procédons comme suit.
Comme dans le modèle de croissance démographique précédent (voir section 1.1), pour les victimes, nous avons l'équation
où une> 0 (taux de natalité supérieur au taux de mortalité)
Coefficient une l'augmentation des proies dépend du nombre de prédateurs (diminue avec leur augmentation). Dans le cas le plus simple a- a - fjy (a>0, p>0). Ensuite, pour la taille de la population de proies, nous avons l'équation différentielle
Pour la population de prédateurs, on a l'équation

où b>0 (la mortalité dépasse le taux de natalité).
Coefficient b L'extinction des prédateurs est réduite s'il y a des proies sur lesquelles se nourrir. Dans le cas le plus simple, on peut prendre b - y -Sx (y > 0, S> 0). Ensuite pour la taille de la population de prédateurs on obtient l'équation différentielle

Ainsi, les équations (1.5) et (1.6) représentent un modèle mathématique du problème considéré d'interaction de population. Dans ce modèle, les variables x,y- l'état du système, et les coefficients caractérisent sa structure. Le système non linéaire (1.5), (1.6) est le modèle de Voltaire-Lotka.
Les équations (1.5) et (1.6) doivent être complétées par des conditions initiales - valeurs données des populations initiales.
Analysons maintenant le modèle mathématique construit.
Construisons le portrait de phase du système (1.5), (1.6) (selon le sens du problème X> 0, v > 0). En divisant l'équation (1.5) par l'équation (1.6), on obtient une équation à variables séparables
En utilisant cette équation, nous aurons
La relation (1.7) donne l'équation des trajectoires des phases sous une forme implicite. Le système (1.5), (1.6) a un état stationnaire déterminé à partir de

A partir des équations (1.8) on obtient (car l* F 0, y* F 0)
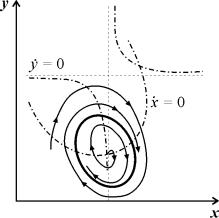
Les égalités (1.9) déterminent la position d'équilibre sur le plan des phases (le point O)(Figure 1.6).

La direction du mouvement le long de la trajectoire de phase peut être déterminée à partir de telles considérations. Qu'il y ait peu de carpes. g.u. x ~ 0, puis de l'équation (1.6) y
Toutes les trajectoires de phase (à l'exception du point 0) courbes fermées entourant la position d'équilibre. L'état d'équilibre correspond à un nombre constant de carassins et piques x' et y'. Les carpes se reproduisent, les brochets les mangent, meurent, mais le nombre de ceux-ci et des autres ne change pas. "Les trajectoires de phase fermée correspondent à un changement périodique du nombre de carassins et de piques. De plus, la trajectoire le long de laquelle le point de phase se déplace dépend des conditions initiales. Considérez comment l'état change le long de la trajectoire de phase. Laissez le point être en position UNE(Fig. 1.6). Il y a peu de carpes ici, beaucoup de brochets ; les brochets n'ont rien à manger, et ils s'éteignent progressivement et presque
complètement disparaître. Mais le nombre de carassins diminue également à presque zéro et
ce n'est que plus tard, lorsque le brochet est devenu moins à, l'augmentation du nombre de carassins commence; leur taux de croissance augmente et leur nombre augmente - cela se produit approximativement au point V Mais une augmentation du nombre de carassins entraîne un ralentissement du processus d'extinction des shuk et leur nombre commence à augmenter (il n'y a plus de nourriture) - intrigue Soleil. De plus, il y a beaucoup de brochets, ils mangent des carassins et les mangent presque tous (section CD). Après cela, les brochets recommencent à mourir et le processus se répète sur une période d'environ 5 à 7 ans. Sur la fig. 1.7 courbes construites qualitativement de l'évolution du nombre de carassins et de brochets en fonction du temps. Les maxima des courbes alternent et les maxima d'abondance du brochet sont en retard par rapport à ceux du carassin.

Ce comportement est typique de divers systèmes prédateur-proie. Interprétons maintenant les résultats obtenus.
Malgré le fait que le modèle considéré est le plus simple et qu'en réalité tout se passe beaucoup plus compliqué, il a permis d'expliquer certaines des choses mystérieuses qui existent dans la nature. Les histoires de pêcheurs sur les périodes où «les brochets eux-mêmes sautent dans leurs mains» sont compréhensibles, la fréquence des maladies chroniques, etc., a été expliquée.
Notons une autre conclusion intéressante qui peut être tirée de la Fig. 1.6. Si au point R il y a une prise rapide de brochet (dans une autre terminologie - tir de loups), puis le système "saute" au point Q, et un mouvement supplémentaire se produit le long d'une trajectoire fermée plus petite, ce qui est intuitivement attendu. Si nous réduisons le nombre de brochets au point R, alors le système ira au point S, et un mouvement supplémentaire se produira le long d'une trajectoire plus large. L'amplitude d'oscillation augmentera. C'est contraire à l'intuition, mais cela explique simplement un tel phénomène: à la suite du tir sur les loups, leur nombre augmente avec le temps. Ainsi, le choix du moment de la prise de vue est important dans ce cas.
Supposons que deux populations d'insectes (par exemple, un puceron et une coccinelle mangeuse de pucerons) soient en équilibre naturel. x-x*, y = y*(point O sur la Fig. 1.6). Considérez l'impact d'une seule application d'un insecticide qui tue x> 0 des victimes et y > 0 des prédateurs sans les détruire complètement. La diminution du nombre des deux populations conduit au fait que le point représentant de la position O"saute" plus près de l'origine, où x > 0, y 0 (Fig. 1.6) Il s'ensuit qu'à la suite de l'action d'un insecticide destiné à détruire les proies (pucerons), le nombre de proies (pucerons) augmente et le nombre de prédateurs (coccinelles) diminue. Il s'avère que le nombre de prédateurs peut devenir si petit qu'ils disparaîtront complètement pour d'autres raisons (sécheresse, maladie, etc.). Ainsi, l'utilisation d'insecticides (à moins qu'ils ne détruisent presque complètement les insectes nuisibles) conduit finalement à une augmentation de la population d'insectes dont le nombre était contrôlé par d'autres prédateurs d'insectes. De tels cas sont décrits dans des livres de biologie.
En général, le taux de croissance du nombre de victimes une dépend à la fois de L" et de y : une= a(x, y) (en raison de la présence de prédateurs et de restrictions alimentaires).
Avec une petite modification du modèle (1.5), (1.6), des petits termes sont ajoutés aux membres droits des équations (en tenant compte, par exemple, de la concurrence des carassins pour la nourriture et des brochets pour les carassins)
ici 0 f.i « 1.
Dans ce cas, la conclusion sur la périodicité du processus (retour du système à l'état initial), valable pour le modèle (1.5), (1.6), perd sa validité. Selon le type de petites corrections / et g Les situations représentées sur la Fig. 1.8.

Dans le cas (1) l'état d'équilibre O régulièrement. Pour toute autre condition initiale, c'est précisément cette valeur qui s'établit après un temps suffisamment long.
Dans le cas (2) le système "va au sol". L'état stationnaire est instable. Un tel système tombe finalement dans une telle gamme de valeurs X et y que le modèle n'est plus applicable.
Dans le cas (3) dans un système avec un état stationnaire instable O le mode périodique s'établit dans le temps. Contrairement au modèle original (1.5), (1.6), dans ce modèle le régime périodique stationnaire ne dépend pas des conditions initiales. Initialement petit écart par rapport à l'état d'équilibre O entraîne de petites fluctuations O, comme dans le modèle de Volterra-Lotka, mais à des oscillations d'amplitude bien définie (et indépendante de la petitesse de l'écart).
DANS ET. Arnold appelle le modèle Volterra-Lotka rigide, car son petit changement peut conduire à des conclusions différentes de celles données ci-dessus. Pour juger laquelle des situations indiquées dans la Fig. 1.8 est implémenté dans ce système, des informations supplémentaires sur le système sont absolument nécessaires (sur le type de petites corrections / et g).
Modèles d'interaction de deux types
Hypothèses de Volterra. Analogies avec la cinétique chimique. Modèles d'interactions de Volterra. Classification des types d'interactions Compétition. Chasseur chassé. Modèles généralisés d'interaction des espèces . Modèle de Kolmogorov. Modèle d'interaction de MacArthur entre deux espèces d'insectes. Paramétrique et des portraits de phase du système Bazykin.
Le mathématicien italien Vito Volterra est à juste titre considéré comme le fondateur de la théorie mathématique moderne des populations, ayant développé la théorie mathématique des communautés biologiques, dont l'appareil est constitué d'équations différentielles et intégro-différentielles.(Vito Volterra. Leçons sur la Théorie Mathématique de la Lutte pour la Vie. Paris, 1931). Au cours des décennies suivantes, la dynamique des populations s'est développée principalement conformément aux idées exprimées dans ce livre. La traduction russe du livre de Volterra a été publiée en 1976 sous le titre "Théorie mathématique de la lutte pour l'existence" avec une postface de Yu.M. Svirezhev, qui traite de l'histoire du développement de l'écologie mathématique dans la période 1931-1976.
Le livre de Volterra est écrit comme les livres de mathématiques sont écrits. Il formule d'abord quelques hypothèses sur les objets mathématiques censés être étudiés, puis une étude mathématique des propriétés de ces objets est effectuée.
Les systèmes étudiés par Volterra se composent de deux ou plusieurs types. Dans certains cas, le stock de nourriture utilisé est pris en compte. Les équations décrivant l'interaction de ces espèces sont basées sur les représentations suivantes.
Hypothèses de Volterra
1. La nourriture est soit disponible en quantité illimitée, soit son approvisionnement dans le temps est strictement réglementé.
2. Les individus de chaque espèce meurent de telle manière qu'une proportion constante d'individus existants périt par unité de temps.
3. Les espèces prédatrices mangent des proies, et dans une unité de temps le nombre de proies consommées est toujours proportionnel à la probabilité de rencontrer des individus de ces deux espèces, c'est-à-dire le produit du nombre de prédateurs et du nombre de proies.
4. S'il y a de la nourriture en quantité limitée et plusieurs espèces capables de la consommer, alors la proportion de nourriture consommée par une espèce par unité de temps est proportionnelle au nombre d'individus de cette espèce, pris avec un certain coefficient dépendant sur l'espèce (modèles de compétition interspécifique).
5. Si une espèce se nourrit de nourriture disponible en quantité illimitée, l'augmentation du nombre d'espèces par unité de temps est proportionnelle au nombre d'espèces.
6. Si une espèce se nourrit d'aliments disponibles en quantité limitée, sa reproduction est régulée par le taux de consommation alimentaire, c'est-à-dire par unité de temps, l'augmentation est proportionnelle à la quantité de nourriture consommée.
Analogies avec la cinétique chimique
Ces hypothèses ont des parallèles étroits avec la cinétique chimique. Dans les équations de la dynamique des populations, comme dans les équations de la cinétique chimique, le "principe des collisions" est utilisé, lorsque la vitesse de réaction est proportionnelle au produit des concentrations des composants réactifs.
En effet, selon les hypothèses de Volterra, la vitesse traiter l'extinction de chaque espèce est proportionnelle à l'abondance de l'espèce. En cinétique chimique, cela correspond à une réaction de décomposition monomoléculaire d'une substance, et dans un modèle mathématique, à des termes linéaires négatifs sur les côtés droits des équations.
Selon les concepts de la cinétique chimique, la vitesse d'une réaction bimoléculaire de l'interaction de deux substances est proportionnelle à la probabilité d'une collision de ces substances, c'est-à-dire le produit de leur concentration. De même, conformément aux hypothèses de Volterra, le taux de reproduction des prédateurs (mort des proies) est proportionnel à la probabilité de rencontres entre prédateur et proie, c'est-à-dire le produit de leurs nombres. Dans les deux cas, les termes bilinéaires apparaissent dans le système du modèle sur les côtés droits des équations correspondantes.
Enfin, les termes positifs linéaires des membres droits des équations de Volterra, correspondant à la croissance démographique dans des conditions non restreintes, correspondent aux termes autocatalytiques des réactions chimiques. Une telle similitude d'équations dans les modèles chimiques et écologiques permet d'appliquer les mêmes méthodes de recherche pour la modélisation mathématique de la cinétique des populations que pour les systèmes de réactions chimiques.
Classification des types d'interactions
Conformément aux hypothèses de Volterra, l'interaction de deux espèces, dont le nombre X 1 et X 2 peut être décrit par les équations :
(9.1)
Ici les paramètres une je - les constantes de vitesse de croissance des espèces, c je- constantes autolimitantes de la population (compétition intraspécifique), b ij‑ les constantes d'interaction des espèces, (je, j= 1,2). Les signes de ces coefficients déterminent le type d'interaction.
Dans la littérature biologique, les interactions sont généralement classées en fonction des mécanismes impliqués. La diversité y est énorme : interactions trophiques diverses, interactions chimiques qui existent entre bactéries et algues planctoniques, interactions de champignons avec d'autres organismes, successions d'organismes végétaux liées notamment à la compétition pour la lumière solaire et à l'évolution des sols, etc. Une telle classification semble indéfinissable.
E . Odum, tenant compte des modèles proposés par V. Volterra, a proposé une classification non par mécanismes, mais par résultats. Selon cette classification, les relations doivent être évaluées comme positives, négatives ou neutres, selon que l'abondance d'une espèce augmente, diminue ou reste inchangée en présence d'une autre espèce. Ensuite, les principaux types d'interactions peuvent être présentés sous forme de tableau.
TYPES D'INTERACTIONS D'ESPÈCES
|
SYMBIOSE |
b 12 ,b 21 >0 |
||
|
COMMENSALISME |
b 12 ,>0, b 21 =0 |
||
|
Chasseur chassé |
b 12 ,>0, b 21 <0 |
||
|
AMENSALISME |
b 12 ,=0, b 21 <0 |
||
|
CONCURRENCE |
b 12 , b 21 <0 |
||
|
NEUTRALISME |
b 12 , b 21 =0 |
La dernière colonne montre les signes des coefficients d'interaction du système (9.1)
Tenir compte des principaux types d'interactions
ÉQUATIONS DE COMPÉTITION :
Comme nous l'avons vu dans la leçon 6, les équations de compétition sont :
 (9.2)
(9.2)
Solutions de systèmes fixes :
(1).
![]()
L'origine des coordonnées, pour tous les paramètres du système, est un nœud instable.
(2).
![]() (9.3)
(9.3)
C l'état stationnaire (9.3) est une selle à une 1 >b 12 /Avec 2 et
noeud stable à une 1 12 /s 2 . Cette condition signifie que l'espèce disparaît si son propre taux de croissance est inférieur à une certaine valeur critique.
(3).
![]() (9.4)
(9.4)
C solution stationnaire (9.4)¾ selle à une 2 >b 21 /c 1 et un nœud stable à une 2< b 21 /c 1
(4).
![]() (9.5)
(9.5)
L'état stationnaire (9.5) caractérise la coexistence de deux espèces concurrentes et est un nœud stable si la relation est satisfaite :
![]()
Cela implique l'inégalité :
b 12
b 21
ce qui permet de formuler la condition de coexistence des espèces :
Le produit des coefficients d'interaction interpopulation est inférieur au produit des coefficients au sein de l'interaction population.
En effet, laissons les taux de croissance naturels des deux espèces considéréesune 1 , une 2 sont identiques. Alors la condition nécessaire à la stabilité est
c 2 > b 12 ,c 1 >b 21 .
Ces inégalités montrent que l'augmentation du nombre d'un des concurrents supprime plus fortement sa propre croissance que la croissance d'un autre concurrent. Si l'abondance des deux espèces est limitée, partiellement ou totalement, par des ressources différentes, les inégalités ci-dessus sont valables. Si les deux espèces ont exactement les mêmes besoins, alors l'une d'entre elles sera plus viable et évincera sa concurrente.
Le comportement des trajectoires de phase du système donne une représentation visuelle des résultats possibles de la compétition. On égalise les membres droits des équations du système (9.2) à zéro :
X 1 (une 1 -c 1 X 1 – b 12 X 2) = 0 (dx 1 /dt = 0),
X 2 (une 2 –b 21 X 1 – c 2 X 2) = 0 (dx 2 /dt = 0),
Dans ce cas, nous obtenons les équations des principales isoclines du système
X 2 = – b 21 X 1 / c 2 +une 2/c2, X 2 = 0
sont les équations des isoclines des tangentes verticales.
X 2 = – c 1 X 1 /b12+ une 1 /b 12 , X 1 = 0
sont les équations des isoclines des tangentes verticales. Les points d'intersection deux à deux des isoclines des systèmes tangents verticaux et horizontaux sont des solutions stationnaires du système d'équations (9.2.), et leurs coordonnées ![]() sont des nombres stationnaires d'espèces concurrentes.
sont des nombres stationnaires d'espèces concurrentes.
L'emplacement possible des isoclines principales dans le système (9.2) est illustré à la Fig. 9.1. Riz. 9.1unecorrespond à la survie de l'espèceX 1, fig. 9.1 b- la survie de l'espèceX 2, fig. 9.1 v– coexistence d'espèces sous condition (9.6). Illustration 9.1gmontre le système de déclenchement. Ici, le résultat de la compétition dépend des conditions initiales. L'état stationnaire (9.5), non nul pour les deux types, est instable. C'est la selle par laquelle passe la séparatrice, séparant les zones de survie de chacune des espèces.

Riz. 9.1.L'emplacement des principales isoclines dans le portrait de phase du système Volterra de compétition de deux types (9.2) avec différents rapports de paramètres. Explications dans le texte.
Pour étudier la compétition des espèces, des expériences ont été menées sur une variété d'organismes. Habituellement, deux espèces étroitement apparentées sont sélectionnées et cultivées ensemble et séparément dans des conditions strictement contrôlées. A certains intervalles, un recensement complet ou sélectif de la population est effectué. Enregistrez les données de plusieurs expériences répétées et analysez-les. Les études ont été menées sur des protozoaires (notamment des ciliés), de nombreuses espèces de coléoptères du genre Tribolium, Drosophila et des crustacés d'eau douce (daphnies). De nombreuses expériences ont été menées sur des populations microbiennes (voir leçon 11). Des expériences ont également été menées dans la nature, notamment sur des planaires (Reynolds), deux espèces de fourmis (Pontin) et d'autres. 9.2. les courbes de croissance des diatomées utilisant la même ressource (occupant la même niche écologique) sont représentées. Lorsqu'il est cultivé en monoculture Asterionella formosa atteint un niveau constant de densité et maintient la concentration de la ressource (silicate) à un niveau constamment bas. B. Lorsqu'il est cultivé en monoculture Synedrauina se comporte de manière similaire et maintient la concentration en silicate à un niveau encore plus bas. B. Avec co-culture (en double) Synedrauina surpasse Asterionella formosa. Apparemment Synedra

Riz. 9.2.Concours de diatomées. une - lorsqu'il est cultivé en monoculture Asterionella formosa atteint un niveau de densité constant et maintient la concentration de la ressource (silicate) à un niveau constamment bas. b- lorsqu'il est cultivé en monoculture Synedrauina se comporte de manière similaire et maintient la concentration en silicate à un niveau encore plus bas. v- en co-culture (en double) Synedruina surpasse Asterionella formosa. Apparemment Synedra remporte le concours en raison de sa capacité à utiliser plus pleinement le substrat (voir également la leçon 11).
Les expériences de G. Gause sur l'étude de la compétition sont largement connues, démontrant la survie d'une des espèces concurrentes et lui permettant de formuler la "loi d'exclusion compétitive". La loi stipule qu'une seule espèce peut exister dans une niche écologique. Sur la fig. 9.3. les résultats des expériences de Gause pour deux espèces de Parametium occupant la même niche écologique (Fig. 9.3 a, b) et des espèces occupant des niches écologiques différentes (Fig. 9.3. c) sont présentés.

Riz. 9.3. une- Courbes de croissance démographique de deux espèces Paramétium dans des cultures monospécifiques. Cercles noirs - P Aurelia, cercles blancs - P. Caudatum
b- Courbes de croissance P aurelia et P. Caudatum dans une culture mixte.
Par Gause, 1934
Le modèle de compétition (9.2) présente des lacunes, en particulier, il s'ensuit que la coexistence de deux espèces n'est possible que si leur abondance est limitée par des facteurs différents, mais le modèle n'indique pas quelle doit être l'ampleur des différences pour assurer une coexistence à long terme. . En même temps, on sait que la coexistence à long terme dans un environnement changeant nécessite une différence atteignant une certaine valeur. L'introduction d'éléments stochastiques dans le modèle (par exemple, l'introduction d'une fonction d'utilisation des ressources) nous permet d'étudier quantitativement ces questions.
Système prédateur + proie
 (9.7)
(9.7)
Ici, contrairement à (9.2), les signes b 12 et b 21 - différent. Comme dans le cas de la concurrence, l'origine
![]() (9.8)
(9.8)
est un point singulier de type nœud instable. Trois autres états stationnaires possibles :
![]() ,(9.9)
,(9.9)
![]() (9.10)
(9.10)
![]() (9.11)
(9.11)
Ainsi, seule la proie (9.10) peut survivre, seul le prédateur (9.9) (s'il a d'autres sources de nourriture) et la coexistence des deux espèces (9.11) est possible. La dernière option a déjà été envisagée par nous dans la leçon 5. Les types possibles de portraits de phase pour le système prédateur-proie sont illustrés à la Fig. 9.4.
Les isoclines des tangentes horizontales sont des droites
X 2 = – b 21 X 1 /c 2 + une 1/c2, X 2 = 0,
et les isoclines des tangentes verticales- droit
X 2 = - c 1 X 1 /b 12 + une 2 /b 12 , X 1 = 0.
Les points stationnaires se trouvent à l'intersection des isoclines des tangentes verticale et horizontale.

De la fig. 9.4 on voit ce qui suit. système prédateur-proie (9.7) peut avoir une position d'équilibre stable, dans laquelle o rum la population victime est complètement éteinte ( ) et seuls les prédateurs sont restés (point 2 sur la fig. 9.4 une). Évidemment, une telle situation ne peut se réaliser que si, en plus du type de victimes considéré, X 1 prédateur X 2 - a des sources d'alimentation supplémentaires. Ce fait est reflété dans le modèle par le terme positif du côté droit de l'équation pour x 2 . Points singuliers(1) et (3) (Fig. 9.4 une) sont instables. Deuxième possibilité – un état stationnaire stable dans lequel la population de prédateurs a complètement disparu et il ne reste que des victimes – point stable(3) (Fig. 9.4 6 ). Voici un point particulier (1) – également un nœud instable.
Enfin, la troisième possibilité – coexistence stable des populations de prédateurs et de proies (Fig. 9.4 v), dont les abondances stationnaires sont exprimées par les formules (9.11).
Comme dans le cas d'une seule population (voir leçon 3), pour le modèle (9.7) il est possible de développer un modèle stochastique, mais il ne peut pas être résolu explicitement. Par conséquent, nous nous en tenons à des considérations générales. Supposons, par exemple, que le point d'équilibre soit à une certaine distance de chacun des axes. Alors pour les trajectoires de phase sur lesquelles les valeursX 1 , X 2 restent suffisamment grands, un modèle déterministe sera tout à fait satisfaisant. Mais si à un certain point de la trajectoire de phase une variable n'est pas très grande, alors les fluctuations aléatoires peuvent devenir importantes. Ils conduisent au fait que le point représentatif se déplacera vers l'un des axes, ce qui signifie l'extinction de l'espèce correspondante.
Ainsi, le modèle stochastique s'avère instable, puisque la « dérive » stochastique conduit tôt ou tard à l'extinction de l'une des espèces. Dans ce type de modèle, le prédateur finit par disparaître, soit par hasard, soit parce que sa population de proies est éliminée en premier. Le modèle stochastique du système prédateur-proie explique bien les expériences de Gause (Gause, 1934), dans lequel les ciliés Paramettum candatum servi de proie à un autre cilié Didinium nasatum – prédateur. Attendu selon des équations déterministes (9.7) les nombres d'équilibre dans ces expériences n'étaient que d'environ cinq individus de chaque espèce, il n'y a donc rien de surprenant dans le fait que dans chaque expérience répétée, les prédateurs ou les proies (puis les prédateurs) se sont éteints assez rapidement. En figue. 9.5.

Riz. 9.5. Croissance Parametium caudatum et ciliés prédateurs Dadinium Nasutum. À partir de : Gause G.F. La lutte pour l'existence. Baltimore, 1934
Ainsi, l'analyse des modèles Volterra d'interaction des espèces montre que, malgré la grande variété de types de comportement de tels systèmes, il ne peut y avoir aucune fluctuation de population non amortie dans le modèle des espèces concurrentes. Cependant, de telles fluctuations sont observées dans la nature et dans l'expérience. La nécessité de leur explication théorique a été l'une des raisons de formuler des descriptions de modèles sous une forme plus générale.
Modèles généralisés d'interaction de deux types
Un grand nombre de modèles ont été proposés qui décrivent l'interaction des espèces, dont les membres droits des équations étaient des fonctions de la taille des populations en interaction. La question de l'élaboration de critères généraux pour déterminer quel type de fonctions peut décrire le comportement de la taille temporaire de la population, y compris les fluctuations stables, a été discutée. Les plus connus de ces modèles sont ceux de Kolmogorov (1935, révisé 1972) et Rosenzweig (1963).
 (9.12)
(9.12)
Le modèle est basé sur les hypothèses suivantes :
1) Les prédateurs n'interagissent pas entre eux, c'est-à-dire taux de reproduction des prédateurs k 2 et nombre de victimes L, exterminé par unité de temps par un prédateur, ne dépend pas de y.
2) L'augmentation du nombre de proies en présence de prédateurs est égale à l'augmentation en l'absence de prédateurs moins le nombre de proies exterminées par les prédateurs. Les fonctions k 1 (X), k 2 (X), L(X), sont continues et définies sur le demi-axe positif X, y³ 0.
3) ns 1 /dx< 0. Cela signifie que le facteur de multiplication des proies en l'absence d'un prédateur diminue de manière monotone avec une augmentation du nombre de proies, ce qui reflète la nourriture et les autres ressources limitées.
4) ns 2 /dx> 0, k 2 (0) < 0 < k 2 (¥ ). Avec une augmentation du nombre de proies, le facteur de multiplication des prédateurs diminue de manière monotone avec une augmentation du nombre de proies, passant de valeurs négatives (quand il n'y a rien à manger) à des valeurs positives.
5) Le nombre de victimes exterminées par un prédateur par unité de temps L(X)> 0 à N> 0; L(0)=0.
Les types possibles de portraits de phase du système (9.12) sont illustrés à la fig. 9.6 :

Riz. 9.6.Portraits de phase du système de Kolmogorov (9.12), qui décrit l'interaction de deux types pour différents rapports de paramètres. Explications dans le texte.
Les solutions stationnaires (il y en a deux ou trois) ont les coordonnées suivantes :
(1). ` x=0 ;` y=0.
L'origine des coordonnées pour toutes les valeurs des paramètres est une selle (Fig. 9.6 a-d).
(2). ` x=A,` y=0.(9.13)
UNEest déterminé à partir de l'équation :
k 1 (UNE)=0.
Stationnaire la solution (9.13) est une selle si B< UNE (Fig. 9.6 une, b, g), B déterminé à partir de l'équation
k 2 (B)=0
Le point (9.13) est placé dans le quadrant positif si B>A . Ceci est un nœud stable .
Le dernier cas, qui correspond à la mort du prédateur et à la survie de la proie, est représenté sur la Fig. 9.6 v.
(3). ` x=B,` y=C.(9.14)
La valeur de C est déterminée à partir des équations :
Point (9.14) - mise au point (Fig. 9.6 une) ou nœud (Fig. 9.6 g), dont la stabilité dépend du signe de la grandeurs
s 2 = – k 1 (B)-k 1 (B)N+L(B)C
Si s>0, le point est stable sis<0 ‑ точка неустойчива, и вокруг нее могут существовать предельные циклы (рис. 9.6 b)
Dans la littérature étrangère, un modèle similaire proposé par Rosenzweig et MacArthur (1963) est plus souvent considéré :
 (9.15)
(9.15)
où F(X) - le taux de variation du nombre de victimes X en l'absence de prédateurs, F( x,y) est l'intensité de la prédation, k- coefficient caractérisant l'efficacité de conversion de la biomasse des proies en biomasse des prédateurs, e- Mortalité des prédateurs.
Le modèle (9.15) se réduit à un cas particulier du modèle de Kolmogorov (9.12) sous les hypothèses suivantes :
1) le nombre de prédateurs n'est limité que par le nombre de proies,
2) la vitesse à laquelle un individu donné d'un prédateur mange une proie ne dépend que de la densité de population de proies et ne dépend pas de la densité de population de prédateurs.
Alors les équations (9.15) prennent la forme.

Lors de la description de l'interaction d'espèces réelles, les bonnes parties des équations sont concrétisées conformément aux idées sur les réalités biologiques. Considérez l'un des modèles les plus populaires de ce type.
Modèle d'interaction entre deux espèces d'insectes (Mac Arthur, 1971)
Le modèle, dont nous parlerons ci-dessous, a été utilisé pour résoudre le problème pratique de la lutte antiparasitaire en stérilisant les mâles de l'une des espèces. Sur la base des caractéristiques biologiques de l'interaction des espèces, le modèle suivant a été écrit
 (9.16)
(9.16)
Ici x,y- la biomasse de deux espèces d'insectes. Les interactions trophiques des espèces décrites dans ce modèle sont très complexes. Ceci détermine la forme des polynômes sur les côtés droits des équations.
Considérez le côté droit de la première équation. Espèces d'insectes X manger les larves de l'espèce à(membre + k 3 y), mais les adultes de l'espèce à manger les larves de l'espèce X soumis à un grand nombre d'espèces X ou à ou les deux (membres – k 4 xy, – y 2). Au petit X mortalité des espèces X supérieur à son accroissement naturel (1 –k 1 +k 2 x–x 2 < 0 au petit X). Dans la deuxième équation, le terme k 5 reflète la croissance naturelle de l'espèce y; –k 6 v- auto-limitation de ce genre,–k 7 X- manger des larves de l'espèce à insectes de l'espèce x, k 8 xy – croissance de la biomasse des espèces à en étant mangé par des insectes adultes de l'espèce à les larves de l'espèce X.
Sur la fig. 9.7 le cycle limite est présenté, qui est la trajectoire d'une solution périodique stable du système (9.16).
Bien entendu, la solution de la question de savoir comment assurer la coexistence d'une population avec son environnement biologique ne peut être obtenue sans prendre en compte les spécificités d'un système biologique particulier et une analyse de toutes ses interrelations. Parallèlement, l'étude des modèles mathématiques formels permet de répondre à quelques questions générales. On peut avancer que pour les modèles du type (9.12), le fait de compatibilité ou d'incompatibilité des populations ne dépend pas de leur taille initiale, mais n'est déterminé que par la nature de l'interaction des espèces. Le modèle permet de répondre à la question : comment influencer la biocénose, la gérer afin de détruire au plus vite les espèces nuisibles.
La gestion peut être réduite à un changement spasmodique à court terme de l'ampleur de la population X et y. Cette méthode correspond à des méthodes de lutte telles qu'une destruction unique d'une ou des deux populations par voie chimique. D'après la déclaration formulée ci-dessus, on peut voir que pour les populations compatibles, cette méthode de contrôle sera inefficace, car avec le temps, le système atteindra à nouveau un régime stationnaire.
Une autre façon consiste à modifier le type de fonctions d'interaction entre les types, par exemple lors de la modification des valeurs des paramètres système. C'est précisément à cette méthode paramétrique que correspondent les méthodes biologiques de lutte. Ainsi, lorsque des mâles stérilisés sont introduits, le coefficient de croissance naturelle de la population diminue. Si en même temps nous obtenons un autre type de portrait de phase, celui où il n'y a qu'un état stationnaire stable avec zéro nombre de parasites, le contrôle conduira au résultat souhaité – destruction de la population de ravageurs. Il est intéressant de noter qu'il est parfois conseillé d'appliquer l'impact non pas sur le ravageur lui-même, mais sur son partenaire. Laquelle des méthodes est la plus efficace, dans le cas général, il est impossible de le dire. Elle dépend des contrôles disponibles et de la forme explicite des fonctions décrivant l'interaction des populations.
Modèle ADBazykin
L'analyse théorique des modèles d'interaction d'espèces est réalisée de manière plus exhaustive dans le livre de A.D. Bazykin "Biophysics of interacting populations" (M., Nauka, 1985).
Prenons l'un des modèles prédateur-proie étudiés dans ce livre.
 (9.17)
(9.17)
Le système (9.17) est une généralisation du modèle prédateur-proie de Volterra le plus simple (5.17) prenant en compte l'effet de saturation des prédateurs. Le modèle (5.17) suppose que l'intensité du broutage des proies augmente linéairement avec l'augmentation de la densité des proies, ce qui ne correspond pas à la réalité à des densités de proies élevées. Différentes fonctions peuvent être choisies pour décrire la dépendance du régime alimentaire des prédateurs à la densité des proies. Il est très important que la fonction choisie avec l'augmentation X tend asymptotiquement vers une valeur constante. Le modèle (9.6) utilise la dépendance logistique. Dans le modèle de Bazykin, l'hyperbole est choisie comme une telle fonction X/(1+px). Rappelons que la formule de Monod, qui décrit la dépendance du taux de croissance des micro-organismes à la concentration du substrat, a cette forme. Ici, la proie agit comme un substrat et le prédateur agit comme des micro-organismes. .
Le système (9.17) dépend de sept paramètres. Le nombre de paramètres peut être réduit en modifiant les variables :
X® (UN D)X; y ® (UN D)/y ;
t® (1/A)t; g (9.18)
et dépend de quatre paramètres.
Pour une étude qualitative complète, il est nécessaire de diviser l'espace des paramètres à quatre dimensions en régions avec différents types de comportement dynamique, c'est-à-dire construire un portrait paramétrique ou structurel du système.
Il faut ensuite construire des portraits de phase pour chacune des régions du portrait paramétrique et décrire les bifurcations qui se produisent avec des portraits de phase aux frontières des différentes régions du portrait paramétrique.
La construction d'un portrait paramétrique complet s'effectue sous la forme d'un ensemble de "tranches" (projections) d'un portrait paramétrique de petite dimension avec des valeurs fixes de certains des paramètres.
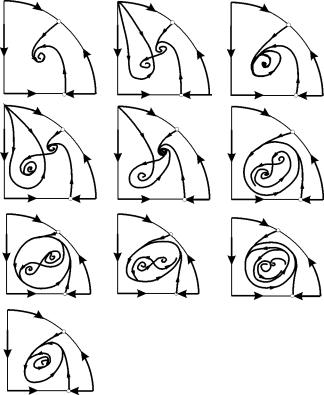
Portrait paramétrique du système (9.18) pour fixe g et petit e illustré à la Figure 9.8. Le portrait contient 10 zones avec différents types de comportement de trajectoire de phase.

Riz. 9.8.Portrait paramétrique du système (9.18) pour fixeg
et petit e
Le comportement du système avec différents rapports de paramètres peut être significativement différent (Fig. 9.9). Les éléments suivants sont possibles dans le système :
1) un équilibre stable (régions 1 et 5) ;
2) un cycle limite stable (régions 3 et 8) ;
3) deux équilibres stables (région 2)
4) cycle limite stable et équilibre instable à l'intérieur (régions 6, 7, 9, 10)
5) cycle limite stable et équilibre stable en dehors de celui-ci (région 4).
Dans les régions paramétriques 7, 9, 10, la région d'attraction d'équilibre est limitée par un cycle limite instable situé à l'intérieur du cycle stable. Le plus intéressant est le portrait de phase correspondant à la région 6 du portrait paramétrique. Il est montré en détail dans la Fig. 9.10.
La région d'attraction d'équilibre B 2 (grisée) est un « escargot » en torsion à partir du foyer instable B 1 . Si l'on sait qu'au moment initial le système se trouvait au voisinage de B 1, alors il est possible de juger si la trajectoire correspondante arrivera à l'équilibre B 2 ou à un cycle limite stable entourant les trois points d'équilibre C ( selle), B 1 et B 2 uniquement sur la base de considérations probabilistes.
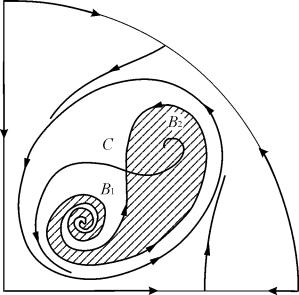
Fig.9.10.Portrait de phase du système 9.18 pour la région paramétrique 6. La région d'attraction B 2 est grisée
Sur un portrait paramétrique(9.7) il y a 22 diverses limites de bifurcation qui forment 7 différents types de bifurcations. Leur étude permet d'identifier les types de comportement possibles du système lorsque ses paramètres changent. Par exemple, lorsque vous quittez la zone 1 à la zone 3 il y a naissance d'un petit cycle limite, ou naissance douce d'auto-oscillations autour d'un seul équilibre V Une naissance douce similaire d'auto-oscillations, mais autour d'un des équilibres, à savoir B 1 , se produit lors du franchissement de la frontière des régions 2 et 4. En quittant la zone 4 à la zone 5 cycle limite stable autour d'un pointB 1 "éclate" sur la boucle séparatrice et le seul point d'attraction est l'équilibre B 2 etc.
D'un intérêt particulier pour la pratique est, bien sûr, le développement de critères pour la proximité d'un système aux frontières de bifurcation. En effet, les biologistes connaissent bien la propriété « tampon » ou « flexibilité » des systèmes écologiques naturels. Ces termes désignent généralement la capacité du système à absorber les influences externes, pour ainsi dire. Tant que l'intensité de l'action extérieure ne dépasse pas une certaine valeur critique, le comportement du système ne subit pas de changements qualitatifs. Sur le plan des phases, cela correspond au retour du système à un état d'équilibre stable ou à un cycle limite stable, dont les paramètres diffèrent peu de celui initial. Lorsque l'intensité de l'impact dépasse celle autorisée, le système «s'effondre», passe dans un mode de comportement dynamique qualitativement différent, par exemple, il s'éteint tout simplement. Ce phénomène correspond à une transition de bifurcation.
Chaque type de transitions de bifurcation a ses propres particularités qui permettent de juger du danger d'une telle transition pour l'écosystème. Voici quelques critères généraux qui témoignent de la proximité d'une frontière dangereuse. Comme dans le cas d'une espèce, si une diminution du nombre d'une des espèces provoque le « blocage » du système près d'un point de selle instable, ce qui se traduit par une récupération très lente du nombre à la valeur initiale, alors le système est proche de la frontière critique. Le changement sous forme de fluctuations du nombre de prédateurs et de proies sert également d'indicateur de danger. Si les oscillations deviennent relaxationnelles de proches à harmoniques, et que l'amplitude des oscillations augmente, cela peut conduire à une perte de stabilité du système et à l'extinction de l'une des espèces.
L'approfondissement de la théorie mathématique de l'interaction des espèces va dans le sens du détail de la structure des populations elles-mêmes et de la prise en compte des facteurs temporels et spatiaux.
Littérature.
Kolmogorov A.N. Etude qualitative des modèles mathématiques de la dynamique des populations. // Problèmes de cybernétique. M., 1972, numéro 5.
MacArtur R. Analyse graphique des systèmes écologiques // Division du rapport de biologie Perinceton University. 1971
AD Bazykin « Biophysique des populations en interaction ». M., Nauka, 1985.
W. Volterra: "Théorie mathématique de la lutte pour l'existence." M.. Sciences, 1976
Gaze G.F. La lutte pour l'existence. Baltimore, 1934.
Souvent, les membres d'une espèce (population) se nourrissent des membres d'une autre espèce.
Le modèle Lotka-Volterra est un modèle de l'existence mutuelle de deux populations de type "prédateur-proie".
Le modèle "prédateur-proie" a été obtenu pour la première fois par A. Lotka en 1925, qui l'a utilisé pour décrire la dynamique des populations biologiques en interaction. En 1926, indépendamment de Lotka, des modèles similaires (d'ailleurs plus complexes) ont été développés par le mathématicien italien V. Volterra, dont les recherches approfondies dans le domaine des problèmes environnementaux ont jeté les bases de la théorie mathématique des communautés biologiques, ou la soi-disant . écologie mathématique.
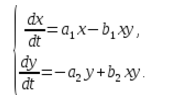
Sous forme mathématique, le système d'équations proposé a la forme :
où x est le nombre de proies, y est le nombre de prédateurs, t est le temps, α, β, γ, δ sont des coefficients reflétant les interactions entre populations.
Formulation du problème
Considérez un espace fermé dans lequel il y a deux populations - les herbivores ("victimes") et les prédateurs. On pense que les animaux ne sont ni importés ni exportés et qu'il y a suffisamment de nourriture pour les herbivores. Ensuite, l'équation pour changer le nombre de victimes (uniquement les victimes) prendra la forme :
où $α$ est le taux de natalité des victimes,
$x$ est la taille de la population de proies,
$\frac(dx)(dt)$ est le taux de croissance de la population de proies.
Lorsque les prédateurs ne chassent pas, ils peuvent mourir, donc l'équation du nombre de prédateurs (uniquement les prédateurs) devient :
Où $γ$ est le coefficient d'extinction des prédateurs,
$y$ est la taille de la population de prédateurs,
$\frac(dy)(dt)$ est le taux de croissance de la population de prédateurs.
Lorsque les prédateurs et les proies se rencontrent (la fréquence des rencontres est directement proportionnelle au produit), les prédateurs détruisent les proies avec un coefficient, les prédateurs bien nourris peuvent reproduire la progéniture avec un coefficient. Ainsi, le système d'équations du modèle prendra la forme :
La solution du problème
Construisons un modèle mathématique de la coexistence de deux populations biologiques de type "prédateur-proie".
Laissez deux populations biologiques vivre ensemble dans un environnement isolé. L'environnement est stationnaire et fournit une quantité illimitée de tout ce qui est nécessaire à la vie de l'une des espèces - la victime. Une autre espèce - un prédateur - vit également dans des conditions stationnaires, mais ne se nourrit que de proies. Les chats, les loups, les brochets, les renards peuvent agir comme prédateurs, et les poulets, les lièvres, les carassins, les souris, respectivement, peuvent agir comme victimes.
Pour plus de précision, considérons les chats comme des prédateurs et les poulets comme des victimes.
Ainsi, les poulets et les chats vivent dans un espace isolé - la cour du ménage. L'environnement fournit aux poulets une nourriture illimitée, tandis que les chats ne mangent que les poulets. Dénoter par
$x$ - le nombre de poulets,
$y$ est le nombre de chats.
Au fil du temps, le nombre de poulets et de chats change, mais nous considérerons $x$ et $y$ comme des fonctions continues du temps t. Appelons une paire de nombres $x, y)$ l'état du modèle.
Voyons comment l'état du modèle $(x, y).$ change
Considérez $\frac(dx)(dt)$, le taux de variation du nombre de poulets.
S'il n'y a pas de chats, le nombre de poulets augmente et plus vite, plus il y a de poulets. On considérera la dépendance linéaire :
$\frac(dx)(dt) a_1 x$,
$a_1$ est un coefficient qui ne dépend que des conditions de vie des poulets, de leur mortalité naturelle et de leur taux de natalité.
$\frac(dy)(dt)$ – le taux de variation du nombre de chats (s'il n'y a pas de poulets), dépend du nombre de chats y.
S'il n'y a pas de poulets, le nombre de chats diminue (ils n'ont pas de nourriture) et ils meurent. On considérera la dépendance linéaire :
$\frac(dy)(dt) - a_2 y$.
Dans l'écosystème, le taux de variation du nombre de chaque espèce sera également considéré comme proportionnel à son nombre, mais seulement avec un coefficient dépendant du nombre d'individus d'une autre espèce. Ainsi, pour les poulets, ce coefficient diminue avec une augmentation du nombre de chats, et pour les chats, il augmente avec une augmentation du nombre de poulets. Nous supposerons que la dépendance est également linéaire. On obtient alors un système d'équations différentielles :
Ce système d'équations est appelé le modèle de Volterra-Lotka.
a1, a2, b1, b2 sont des coefficients numériques, appelés paramètres du modèle.
Comme vous pouvez le voir, la nature du changement d'état du modèle (x, y) est déterminée par les valeurs des paramètres. En modifiant ces paramètres et en résolvant le système d'équations du modèle, il est possible d'étudier les schémas de changement de l'état du système écologique.
À l'aide du programme MATLAB, le système d'équations de Lotka-Volterra est résolu comme suit :
Sur la fig. 1 montre la solution du système. Selon les conditions initiales, les solutions sont différentes, ce qui correspond à des couleurs différentes des trajectoires.
Sur la fig. 2 montre les mêmes solutions, mais en tenant compte de l'axe des temps t (c'est-à-dire qu'il y a une dépendance temporelle).
La modélisation mathématique des processus biologiques a commencé avec la création des premiers modèles simples d'un système écologique.
Supposons que les lynx et les lièvres vivent dans une zone fermée. Les lynx ne mangent que des lièvres, et les lièvres mangent des aliments végétaux disponibles en quantités illimitées. Il est nécessaire de trouver des caractéristiques macroscopiques qui décrivent les populations. Ces caractéristiques sont le nombre d'individus dans les populations.
Le modèle le plus simple des relations entre les populations de prédateurs et de proies, basé sur l'équation de croissance logistique, porte le nom (ainsi que le modèle de compétition interspécifique) de ses créateurs, Lotka et Volterra. Ce modèle simplifie grandement la situation à l'étude, mais reste utile comme point de départ dans l'analyse du système prédateur-proie.
Supposons que (1) une population de proies existe dans un environnement idéal (indépendant de la densité) où sa croissance ne peut être limitée que par la présence d'un prédateur, (2) un environnement tout aussi idéal dans lequel il existe un prédateur dont la croissance de la population est limitée uniquement par l'abondance des proies, (3 ) les deux populations se reproduisent en continu selon l'équation de croissance exponentielle, (4) le taux de prédateurs mangeant des proies est proportionnel à la fréquence des rencontres entre eux, qui, à son tour, est fonction de la population densité. Ces hypothèses sous-tendent le modèle Lotka-Volterra.
Laissez la population de proies croître de façon exponentielle en l'absence de prédateurs :
dN/dt = r 1 N 1
où N est le nombre et r est le taux de croissance instantané spécifique de la population de proies. Si des prédateurs sont présents, ils détruisent les individus proies à un rythme déterminé, d'une part, par la fréquence des rencontres entre prédateurs et proies, qui augmente à mesure que leur nombre augmente, et, d'autre part, par l'efficacité avec laquelle le prédateur détecte et attrape sa proie. lors de la rencontre. Le nombre de victimes rencontrées et mangées par un prédateur N c est proportionnel à l'efficacité de la chasse, que nous exprimerons par le coefficient C 1 ; le nombre (densité) de la victime N et le temps passé à chercher T :
N C \u003d C 1 NT(1)
A partir de cette expression, il est facile de déterminer le taux spécifique de consommation de proies par un prédateur (c'est-à-dire le nombre de proies mangées par un individu d'un prédateur par unité de temps), qui est souvent aussi appelé la réponse fonctionnelle d'un prédateur à la densité de population de proies :
Dans le modèle considéré À partir de 1 est une constante. Cela signifie que le nombre de proies capturées par les prédateurs dans une population augmente linéairement avec l'augmentation de sa densité (réponse fonctionnelle dite de type 1). Il est clair que le taux total de consommation de proies par tous les individus du prédateur sera :
![]() (3)
(3)
où R- populations de prédateurs. Nous pouvons maintenant écrire l'équation de croissance de la population de proies comme suit :
En l'absence de proie, les individus prédateurs meurent de faim et meurent. Supposons également que dans ce cas la population de prédateurs diminuera de façon exponentielle selon l'équation :
![]() (5)
(5)
où r2- mortalité instantanée spécifique dans la population de prédateurs.
S'il y a des victimes, alors les individus du prédateur qui peuvent les trouver et les manger se multiplieront. Le taux de natalité dans la population de prédateurs dans ce modèle ne dépend que de deux circonstances : le taux de consommation de proies par le prédateur et l'efficacité avec laquelle la nourriture consommée est transformée par le prédateur en sa progéniture. Si nous exprimons cette efficacité en termes de coefficient s, alors le taux de natalité sera :
![]()
Comme C 1 et s sont des constantes, leur produit est aussi une constante, que nous noterons C 2 . Ensuite, le taux de croissance de la population de prédateurs sera déterminé par l'équilibre des naissances et des décès conformément à l'équation :
![]() (6)
(6)
Les équations 4 et 6 forment ensemble le modèle Lotka-Volterra.
On peut explorer les propriétés de ce modèle exactement de la même manière que dans le cas de la concurrence, c'est-à-dire en construisant un diagramme de phase, sur lequel le nombre de proies est tracé le long de l'axe des ordonnées, et prédateur - le long de l'axe des abscisses, et en y traçant des isoclines-lignes, correspondant à un nombre constant de populations. À l'aide de ces isoclines, le comportement des populations de prédateurs et de proies en interaction est déterminé.
Pour la population de proies : d'où
Ainsi, puisque r et C 1 sont des constantes, l'isocline de la proie sera la ligne sur laquelle l'abondance du prédateur (R) est constant, c'est-à-dire parallèle à l'axe des x et coupant l'axe des y en un point P \u003d r 1 /À partir de 1 . Au-dessus de cette ligne, le nombre de proies diminuera et en dessous, il augmentera.
Pour la population de prédateurs :
d'où
Dans la mesure où r2 et C 2 - constantes, l'isocline du prédateur sera la ligne sur laquelle le nombre de proies (N) est constant, c'est-à-dire perpendiculaire à l'axe des ordonnées et coupant l'axe des abscisses au point N = r 2 /C 2. À gauche de celui-ci, le nombre de prédateurs diminuera et à droite - augmentera.
Si nous considérons ces deux isoclines ensemble, nous pouvons facilement voir que l'interaction entre les populations de prédateurs et de proies est cyclique, puisque leurs nombres subissent des fluctuations conjuguées illimitées. Lorsque le nombre de proies est élevé, le nombre de prédateurs augmente, ce qui conduit à une augmentation de la pression de prédation sur la population de proies et donc à une diminution de son nombre. Cette diminution, à son tour, entraîne une pénurie de nourriture pour les prédateurs et une baisse de leur nombre, ce qui provoque un affaiblissement de la pression de prédation et une augmentation du nombre de proies, ce qui entraîne à nouveau une augmentation de la population de proies, etc.
Ce modèle est caractérisé par ce qu'on appelle la "stabilité neutre", ce qui signifie que les populations exécutent le même cycle d'oscillations indéfiniment jusqu'à ce qu'une influence externe modifie leur nombre, après quoi les populations exécutent un nouveau cycle d'oscillations avec des paramètres différents. . Pour que les cycles se stabilisent, les populations doivent, après influences extérieures, s'efforcer de revenir au cycle initial. De tels cycles, contrairement aux oscillations neutres stables dans le modèle Lotka-Volterra, sont appelés cycles limites stables.
Le modèle Lotka-Volterra, cependant, est utile en ce qu'il nous permet de démontrer la tendance principale de la relation prédateur-proie, l'émergence de fluctuations conjuguées cycliques du nombre de leurs populations.
Retour dans les années 20. A. Lotka, et un peu plus tard, indépendamment de lui, W. Voltaire, ont proposé des modèles mathématiques décrivant les fluctuations conjuguées du nombre de prédateurs et de proies.
Le modèle se compose de deux composants :
C est le nombre de prédateurs ; N est le nombre de victimes ;
Supposons qu'en l'absence de prédateurs, la population de proies croît de façon exponentielle : dN/dt = rN. Mais les proies sont détruites par les prédateurs à un rythme déterminé par la fréquence des rencontres prédateur-proie, et la fréquence des rencontres augmente à mesure que le nombre de prédateurs (C) et de proies (N) augmente. Le nombre exact de proies rencontrées et mangées avec succès dépendra de l'efficacité avec laquelle le prédateur trouve et capture la proie, c'est-à-dire de a' - "efficacité de la recherche" ou "fréquence des attaques". Ainsi, la fréquence des rencontres « réussies » entre le prédateur et la proie et, par conséquent, le taux de consommation des proies sera égal à a’CN et en général : dN/dt = rN – a’CN (1*).
En l'absence de nourriture, les individus du prédateur perdent du poids, meurent de faim et meurent. Supposons que dans le modèle considéré, la taille de la population de prédateurs en l'absence de nourriture due à la famine diminuera de façon exponentielle : dC/dt = - qC, où q est la mortalité. Le décès est compensé par la naissance de nouveaux individus à un rythme qui, comme on le croit dans ce modèle, dépend de deux circonstances :
1) taux d'apport alimentaire, a'CN ;
2) l'efficacité (f) avec laquelle cette nourriture passe dans la progéniture du prédateur.
Ainsi, le taux de natalité d'un prédateur est égal à fa'CN et en général : dC/dt = fa'CN – qC (2*). Les équations 1* et 2* constituent le modèle de Lotka-Voltaire. Les propriétés de ce modèle peuvent être étudiées, des lignes isoclines correspondant à une taille de population constante peuvent être construites, à l'aide de telles isoclines, le comportement des populations prédateurs-proies en interaction est déterminé.
Dans le cas de la population de proies : dN/dt = 0, rN = a'CN, ou C = r/a'. Parce que r et a' = const, l'isocline de la victime sera la ligne pour laquelle la valeur de C est constante :
A faible densité de prédateurs (C), le nombre de proies (N) augmente, au contraire, il diminue.
De même pour les prédateurs (équation 2*) avec dC/dt = 0, fa'CN = qC, ou N = q/fa', c'est-à-dire l'isocline du prédateur sera la ligne le long de laquelle N est constant : à forte densité de proies, la population de prédateurs augmente, et à faible densité, elle diminue.
Leur nombre subit des fluctuations conjuguées illimitées. Lorsque le nombre de proies est élevé, le nombre de prédateurs augmente, ce qui entraîne une augmentation de la pression des prédateurs sur la population de proies et, par conséquent, une diminution de son nombre. Cette diminution, à son tour, entraîne la restriction des prédateurs dans la nourriture et une diminution de leur nombre, ce qui provoque un affaiblissement de la pression des prédateurs et une augmentation du nombre de proies, ce qui entraîne à nouveau une augmentation de la population de prédateurs. , etc.
Les populations exécutent le même cycle d'oscillations indéfiniment jusqu'à ce qu'une influence externe modifie leur nombre, après quoi les populations exécutent de nouveaux cycles d'oscillations illimitées. En fait, l'environnement change constamment et le nombre de populations passera constamment à un nouveau niveau. Pour que les cycles de fluctuations que réalise une population soient réguliers, ils doivent être stables : si une influence extérieure modifie le niveau des populations, alors elles doivent tendre vers le cycle originel. De tels cycles sont appelés cycles stables et limites.
Le modèle de Lotka-Voltaire permet de montrer la tendance principale de la relation prédateur-proie, qui se traduit par l'apparition de fluctuations d'abondance dans la population de proies, accompagnées de fluctuations d'abondance dans la population de prédateurs. Le principal mécanisme de ces fluctuations est le délai inhérent à la séquence de l'état d'un nombre élevé de proies à un nombre élevé de prédateurs, puis à un faible nombre de proies et un faible nombre de prédateurs, à un nombre élevé de proies. , etc.
5) STRATEGIES DE POPULATION DES PREDATEURS ET DES PROIES
Les relations "prédateur - proie" représentent des liens dans le processus de transfert de matière et d'énergie des phytophages vers les zoophages ou des prédateurs d'un ordre inférieur vers des prédateurs d'un ordre supérieur. Par la nature de ces relations distingue trois variantes de prédateurs:
une) collectionneurs. Predator collectionne les petites victimes mobiles assez nombreuses. Cette variante de la prédation est caractéristique de nombreuses espèces d'oiseaux (traceurs, pinsons, pipits, etc.), qui ne dépensent de l'énergie que pour rechercher des proies ;
b) vrais prédateurs. Le prédateur poursuit et tue la proie ;
v) pâturages. Ces prédateurs utilisent la proie à plusieurs reprises, par exemple des taons ou des taons.
La stratégie d'obtention de nourriture chez les prédateurs vise à assurer l'efficacité énergétique de la nutrition : la consommation d'énergie pour obtenir de la nourriture doit être inférieure à l'énergie obtenue lors de son assimilation.
Vrais prédateurs sont divisées en
les "moissonneurs" qui se nourrissent de ressources abondantes (n, poissons planctoniques et même les baleines à fanons), et les "chasseurs" qui obtiennent une nourriture moins abondante. À son tour
les "chasseurs" sont divisés en "embuscades" à l'affût d'une proie (par exemple, brochet, faucon, chat, coléoptère), "chercheurs" (oiseaux insectivores) et "poursuivants". Pour ce dernier groupe, la recherche de nourriture ne demande pas beaucoup d'énergie, mais il en faut beaucoup pour maîtriser la proie (lions dans les savanes). Cependant, certains prédateurs peuvent combiner des éléments de la stratégie de différentes options de chasse.
Comme pour la relation «phytophage-plante», la situation dans laquelle toutes les victimes seront mangées par des prédateurs, ce qui entraînera finalement leur mort, n'est pas observée dans la nature. balance écologique entre les prédateurs et les proies est soutenu par des mécanismes spéciaux qui réduisent le risque d'extermination complète des victimes. Oui, les victimes peuvent:
Fuir un prédateur. Dans ce cas, à la suite d'adaptations, la mobilité des victimes et des prédateurs augmente, ce qui est particulièrement caractéristique des animaux des steppes, qui n'ont nulle part où se cacher des poursuivants;
Acquérir une couleur protectrice («faire semblant» d'être des feuilles ou des nœuds) ou, au contraire, une couleur vive, N.: rouge, avertissant un prédateur d'un goût amer. Il est bien connu que la couleur du lièvre change à différents moments de l'année, ce qui lui permet de se camoufler dans l'herbe en été, et en hiver sur fond de neige blanche. Un changement adaptatif de coloration peut se produire à différents stades de l'ontogenèse : les bébés phoques sont blancs (la couleur de la neige), tandis que les adultes sont noirs (la couleur d'une côte rocheuse) ;
Répartis en groupes, ce qui rend leur recherche et leur pêche à un prédateur plus énergivores ;
Cachez-vous dans des abris;
Passer à des mesures de défense actives (herbivores à cornes, poissons épineux), parfois articulaires (les bœufs musqués peuvent se « défendre tous azimuts » contre les loups, etc.).
À leur tour, les prédateurs développent non seulement la capacité de poursuivre rapidement les victimes, mais également l'odorat, qui leur permet de déterminer l'emplacement de la victime par l'odorat. De nombreuses espèces de prédateurs déchirent les trous de leurs victimes (renards, loups).
En même temps, eux-mêmes font tout leur possible pour ne pas révéler leur présence. Cela explique la propreté des petits chats, qui passent beaucoup de temps aux toilettes et à enterrer les excréments pour éliminer l'odeur. Les prédateurs portent des "robes de camouflage" (les rayures des brochets et des perches, les rendant moins visibles dans les fourrés de macrophytes, les rayures des tigres, etc.).
Une protection complète contre les prédateurs de tous les individus des populations d'animaux proies ne se produit pas non plus, car cela conduirait non seulement à la mort de prédateurs affamés, mais finalement à la catastrophe des populations de proies. Dans le même temps, en l'absence ou en diminution de la densité de population de prédateurs, le pool génétique de la population de proies se détériore (il reste des animaux malades et âgés) et, en raison d'une forte augmentation de leur nombre, la base de nourriture est sapée.
Pour cette raison, l'effet de la dépendance du nombre de populations de proies et de prédateurs - une pulsation du nombre de la population de proies, suivie d'une pulsation du nombre de la population de prédateurs avec un certain retard ("l'effet Lotka-Volterra" ) - est rarement observée.
Un rapport assez stable s'établit entre les biomasses des prédateurs et des proies. Ainsi, R. Ricklefs cite des données selon lesquelles le rapport de la biomasse des prédateurs et des proies varie de 1:150 à 1:300. Dans différents écosystèmes de la zone tempérée des États-Unis, on compte 300 petits cerfs de Virginie (poids 60 kg), 100 grands wapitis (poids 300 kg) ou 30 élans (poids 350) par loup. Le même modèle a été trouvé dans les savanes.
Avec l'exploitation intensive des populations de phytophages, les gens excluent souvent les prédateurs des écosystèmes (au Royaume-Uni, par exemple, il y a des chevreuils et des cerfs, mais pas de loups ; dans les réservoirs artificiels où les carpes et autres poissons de bassin sont élevés, il n'y a pas de brochets). Dans ce cas, le rôle de prédateur est joué par la personne elle-même, éliminant une partie des individus de la population de phytophages.
Une variante particulière de la prédation est observée chez les plantes et les champignons. Dans le règne végétal, il existe environ 500 espèces capables d'attraper des insectes et de les digérer partiellement à l'aide d'enzymes protéolytiques. Les champignons prédateurs forment des dispositifs de piégeage sous la forme de petites têtes ovales ou sphériques situées sur de courts brins de mycélium. Cependant, le type de piège le plus courant est constitué de réseaux tridimensionnels collants constitués d'un grand nombre d'anneaux résultant de la ramification d'hyphes. Les champignons prédateurs peuvent attraper des animaux assez gros, comme les vers ronds. Une fois que le ver s'est empêtré dans les hyphes, ils se développent à l'intérieur du corps de l'animal et le remplissent rapidement.
1. Niveau de température et d'humidité constant et favorable.
2. Abondance de nourriture.
3. Protection contre les facteurs défavorables.
4. Composition chimique agressive de l'environnement (sucs digestifs).
1. La présence de deux habitats: l'environnement de premier ordre - l'organisme hôte, l'environnement de second ordre - l'environnement extérieur.