Coin entre des lignes droites dans l'espace, nous appellerons n'importe lequel des angles adjacents formés par deux lignes droites tracées à travers un point arbitraire parallèle aux données.
Soit deux droites dans l'espace :
Évidemment, l'angle entre les droites peut être pris comme l'angle entre leurs vecteurs de direction et. Puisque, alors, selon la formule du cosinus de l'angle entre les vecteurs, nous obtenons
Les conditions de parallélisme et de perpendicularité de deux droites sont équivalentes aux conditions de parallélisme et de perpendicularité de leurs vecteurs directeurs et :
Deux droites parallèle si et seulement si leurs coefficients correspondants sont proportionnels, c'est-à-dire je 1 parallèle je 2 si et seulement si parallèle ![]() .
.
Deux droites perpendiculaire si et seulement si la somme des produits des coefficients correspondants est nulle :.
Ont but entre ligne droite et plan
Que ce soit droit ré- non perpendiculaire au plan θ ;
ré′ - projection de la droite ré sur le plan ;
Le plus petit des angles entre les droites ré et ré Nous appellerons angle entre la ligne et le plan.
On le note φ = ( ré,θ)
Si ré, alors ( ré, ) = / 2

oh→j→k→ - système de coordonnées rectangulaires.
Équation plane :
θ: Hache+Par+Cz+ré=0
On suppose que la droite est donnée par un point et un vecteur directeur : ré[M 0,p→]
Vecteur m→(UNE,B,C)⊥θ
Ensuite, il reste à trouver l'angle entre les vecteurs m→ et p→, nous le notons γ = ( m→,p→).
Si l'angle<π/2 , то искомый угол φ=π/2−γ .
Si l'angle γ> π / 2, alors l'angle recherché φ = γ − π / 2
sinφ = sin (2π − γ) = cosγ
sinφ = sin (γ − 2π) = - cosγ
Puis, angle entre la ligne et le plan peut être calculé à l'aide de la formule :
sinφ = ∣cosγ∣ = ∣ ∣ Ap 1+pb 2+Cp 3∣ ∣ √UNE 2+B 2+C 2√p 21+p 22+p 23
Question29. Le concept de forme quadratique. Définition de signe des formes quadratiques.
Forme quadratique j (x 1, x 2, ..., x n) n variables réelles x 1, x 2, ..., x n appelé somme de la forme 
 , (1)
, (1)
où un ij - des nombres appelés coefficients. Sans perte de généralité, on peut supposer que un ij = un ji.
La forme quadratique est appelée valide, si un ij
Î GR. Par une matrice de forme quadratique appelée matrice composée de ses coefficients. La forme quadratique (1) correspond à la seule matrice symétrique  C'est à dire. A T = A... Par conséquent, la forme quadratique (1) peut être écrite sous la forme matricielle j ( X) = x T Axe, où x T = (X 1 X 2 … xn). (2)
C'est à dire. A T = A... Par conséquent, la forme quadratique (1) peut être écrite sous la forme matricielle j ( X) = x T Axe, où x T = (X 1 X 2 … xn). (2)
Et, inversement, toute matrice symétrique (2) correspond à une forme quadratique unique à la notation près des variables.
Par le rang de la forme quadratique appeler le rang de sa matrice. La forme quadratique est appelée non dégénéré, si sa matrice est non dégénérée UNE... (rappelons que la matrice UNE est dit non dégénéré si son déterminant n'est pas nul). Sinon, la forme quadratique est dégénérée.
défini positivement(ou strictement positif) si
j ( X) > 0 , pour tout le monde X = (X 1 , X 2 , …, xn), outre X = (0, 0, …, 0).
Matrice UNE forme quadratique définie positive j ( X) est aussi appelé défini positif. Par conséquent, une seule matrice définie positive correspond à une forme quadratique définie positive et vice versa.
La forme quadratique (1) est appelée défini négativement(ou strictement négatif) si
j ( X) < 0, для любого X = (X 1 , X 2 , …, xn), Outre X = (0, 0, …, 0).
De la même manière que ci-dessus, une matrice de forme quadratique définie négative est également appelée définie négative.
Par conséquent, la forme quadratique définie positivement (négativement) j ( X) atteint la valeur minimale (maximale) j ( X*) = 0 pour X* = (0, 0, …, 0).
Notez que la plupart des formes quadratiques ne sont pas définies, c'est-à-dire qu'elles ne sont ni positives ni négatives. De telles formes quadratiques disparaissent non seulement à l'origine du système de coordonnées, mais aussi en d'autres points.
Lorsque m> 2, des critères particuliers sont nécessaires pour vérifier la définition de la forme quadratique. Considérons-les.
Mineurs majeurs la forme quadratique sont appelés mineurs:


c'est-à-dire qu'il s'agit de mineurs de l'ordre 1, 2, ..., m matrices UNE situé dans le coin supérieur gauche, le dernier d'entre eux coïncide avec le déterminant de la matrice UNE.
Critère de définition positif (Critère Sylvestre)
X) = x T Axeétait défini positif, il faut et il suffit que tous les mineurs principaux de la matrice UNEétaient positifs, c'est-à-dire : M 1 > 0, M 2 > 0, …, M n > 0. Critère de certitude négative Pour que la forme quadratique j ( X) = x T Axeétait défini négativement, il faut et il suffit que ses principaux mineurs d'ordre pair soient positifs, et celui d'ordre impair soit négatif, c'est-à-dire : M 1 < 0, M 2 > 0, M 3 < 0, …, (–1)m
Ce matériel est consacré à un concept tel que l'angle entre deux lignes droites qui se coupent. Dans le premier paragraphe, nous expliquerons ce que c'est et le montrerons en illustrations. Ensuite, nous analyserons de quelles manières vous pouvez trouver le sinus, le cosinus de cet angle et l'angle lui-même (nous considérerons séparément les cas avec un plan et un espace tridimensionnel), donner les formules nécessaires et montrer avec des exemples comment elles sont appliquées en pratique.
Afin de comprendre quel est l'angle formé lorsque deux droites se coupent, il faut se souvenir de la définition même de l'angle, de la perpendicularité et du point d'intersection.
Définition 1
On appelle deux droites sécantes si elles ont un point commun. Ce point est appelé point d'intersection des deux droites.
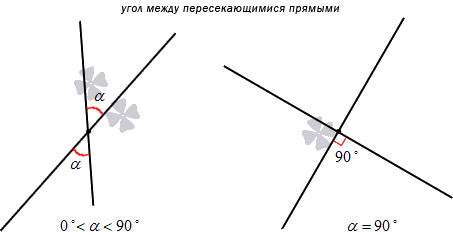
Chaque ligne est divisée par un point d'intersection en rayons. Dans ce cas, les deux droites forment 4 angles, dont deux verticaux et deux adjacents. Si nous connaissons la mesure de l'un d'eux, alors nous pouvons déterminer les autres restants.
Supposons que nous sachions que l'un des angles est égal à . Dans ce cas, l'angle vertical par rapport à lui sera également égal à . Pour trouver les angles restants, nous devons calculer la différence 180 ° - α. Si est égal à 90 degrés, alors tous les angles seront droits. Les lignes se coupant à angle droit sont dites perpendiculaires (un article séparé est consacré à la notion de perpendicularité).
Jetez un oeil à l'image:
Passons à la formulation de la définition principale.
Définition 2
L'angle formé par deux lignes qui se coupent est une mesure du plus petit des 4 angles que forment les deux lignes.
Une conclusion importante doit être tirée de la définition: la taille de l'angle dans ce cas sera exprimée par n'importe quel nombre réel dans l'intervalle (0, 90]. Si les lignes droites sont perpendiculaires, alors l'angle entre elles sera dans tous les cas être égal à 90 degrés.
La capacité de trouver la mesure de l'angle entre deux lignes droites qui se croisent est utile pour résoudre de nombreux problèmes pratiques. La méthode de résolution peut être sélectionnée parmi plusieurs options.
Pour commencer, nous pouvons prendre des méthodes géométriques. Si nous savons quelque chose sur les angles supplémentaires, nous pouvons les associer à l'angle dont nous avons besoin en utilisant les propriétés de formes égales ou similaires. Par exemple, si nous connaissons les côtés d'un triangle et que nous devons calculer l'angle entre les droites sur lesquelles se trouvent ces côtés, alors le théorème du cosinus nous convient. Si nous avons un triangle rectangle dans la condition, la connaissance du sinus, du cosinus et de la tangente d'un angle sera également utile pour les calculs.
La méthode des coordonnées est également très pratique pour résoudre des problèmes de ce type. Expliquons comment l'utiliser correctement.
Nous avons un système de coordonnées rectangulaire (cartésien) O x y, dans lequel deux lignes sont données. Désignons-les par les lettres a et b. Dans ce cas, les droites peuvent être décrites à l'aide de n'importe quelle équation. Les lignes d'origine ont un point d'intersection M. Comment déterminer l'angle requis (notez-le par ) entre ces droites ?
Commençons par formuler le principe de base pour trouver un angle dans des conditions données.
Nous savons que le concept de ligne droite est étroitement lié à des concepts tels que la direction et le vecteur normal. Si nous avons une équation d'une droite, nous pouvons en tirer les coordonnées de ces vecteurs. Nous pouvons le faire pour deux lignes sécantes à la fois.
L'angle formé par deux droites sécantes peut être trouvé en utilisant :
- angle entre les vecteurs de direction ;
- angle entre les vecteurs normaux ;
- l'angle entre le vecteur normal d'une droite et le vecteur directeur de l'autre.
Nous allons maintenant considérer chaque méthode séparément.
1. Supposons que nous ayons une droite a avec un vecteur directeur a → = (a x, a y) et une droite b avec un vecteur directeur b → (b x, b y). Nous allons maintenant reporter deux vecteurs a → et b → du point d'intersection. Après cela, nous verrons qu'ils seront chacun situés sur leur propre ligne. Ensuite, nous avons quatre options pour leur position relative. Voir illustration :

Si l'angle entre les deux vecteurs n'est pas obtus, alors ce sera l'angle dont nous avons besoin entre les droites sécantes a et b. S'il est obtus, alors l'angle recherché sera égal à l'angle adjacent à l'angle a →, b → ^. Ainsi, α = a →, b → ^ si a →, b → ^ 90 °, et α = 180 ° - a →, b → ^ si a →, b → ^> 90 °.
Sur la base du fait que les cosinus d'angles égaux sont égaux, nous pouvons réécrire les égalités résultantes comme suit : cos α = cos a →, b → ^, si a →, b → ^ ≤ 90 °; cos α = cos 180 ° - a →, b → ^ = - cos a →, b → ^, si a →, b → ^> 90 °.
Dans le second cas, des formules de réduction ont été utilisées. De cette façon,
cos α cos a →, b → ^, cos a →, b → ^ ≥ 0 - cos a →, b → ^, cos a →, b → ^< 0 ⇔ cos α = cos a → , b → ^
Écrivons la dernière formule en mots :
Définition 3
Le cosinus de l'angle formé par deux droites sécantes sera égal au module du cosinus de l'angle entre ses vecteurs directeurs.
La vue générale de la formule du cosinus de l'angle entre deux vecteurs a → = (a x, a y) et b → = (b x, b y) ressemble à ceci :
cos a →, b → ^ = a →, b → ^ a → b → = a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2
On peut en déduire la formule du cosinus de l'angle entre deux droites données :
cos α = a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2 = a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2
Ensuite, l'angle lui-même peut être trouvé en utilisant la formule suivante:
α = a r c cos a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2
Ici a → = (a x, a y) et b → = (b x, b y) sont des vecteurs directeurs de droites données.
Donnons un exemple de résolution du problème.
Exemple 1
Dans un système de coordonnées rectangulaires sur le plan, deux droites sécantes a et b sont données. Ils peuvent être décrits par les équations paramétriques x = 1 + 4 · λ y = 2 + λ λ ∈ R et x 5 = y - 6 - 3. Calculez l'angle entre ces lignes.
Solution
Nous avons une équation paramétrique dans la condition, ce qui signifie que pour cette droite, nous pouvons immédiatement écrire les coordonnées de son vecteur direction. Pour ce faire, nous devons prendre les valeurs des coefficients au paramètre, c'est-à-dire la droite x = 1 + 4 y = 2 + λ λ ∈ R aura un vecteur directeur a → = (4, 1).
La deuxième droite est décrite à l'aide de l'équation canonique x 5 = y - 6 - 3. Ici, nous pouvons prendre les coordonnées des dénominateurs. Ainsi, cette ligne a un vecteur directeur b → = (5, - 3).
Ensuite, nous allons directement à la recherche de l'angle. Pour ce faire, nous substituons simplement les coordonnées disponibles des deux vecteurs dans la formule ci-dessus α = a r c cos a x b x + a y + b y a x 2 + a y 2 b x 2 + b y 2. Nous obtenons ce qui suit :
α = a r c cos 4 5 + 1 (- 3) 4 2 + 1 2 5 2 + (- 3) 2 = a r c cos 17 17 34 = a r c cos 1 2 = 45 °
Réponse: Ces lignes droites forment un angle de 45 degrés.
Nous pouvons résoudre un problème similaire en trouvant l'angle entre les vecteurs normaux. Si nous avons une droite a avec un vecteur normal na → = (nax, nay) et une droite b avec un vecteur normal nb → = (nbx, nby), alors l'angle entre eux sera égal à l'angle entre na → et nb → ou l'angle, qui sera adjacent à na →, nb → ^. Cette méthode est montrée dans l'image:

Les formules pour calculer le cosinus de l'angle entre les lignes droites qui se coupent et cet angle lui-même en utilisant les coordonnées des vecteurs normaux ressemblent à ceci :
cos α = cos n a →, n b → ^ = n a x n b x + n a y + n b y n a x 2 + n a y 2 n b x 2 + n b y 2 α = a r c cos n a x n b x + n a y + n b y n a x 2 + n a y 2 n b x 2 + n b y 2
Ici n a → et n b → désignent les vecteurs normaux de deux droites données.
Exemple 2
Dans un système de coordonnées rectangulaires, deux droites sont données en utilisant les équations 3 x + 5 y - 30 = 0 et x + 4 y - 17 = 0. Trouvez le sinus, le cosinus de l'angle entre eux et la valeur de cet angle lui-même.
Solution
Les droites d'origine sont données en utilisant des équations de droites normales de la forme A x + B y + C = 0. Le vecteur normal est noté n → = (A, B). Trouvons les coordonnées du premier vecteur normal pour une droite et notons-les : n a → = (3, 5). Pour la deuxième droite x + 4 y - 17 = 0, le vecteur normal aura pour coordonnées n b → = (1, 4). Ajoutons maintenant les valeurs obtenues à la formule et calculons le total :
cos α = cos n a →, n b → ^ = 3 1 + 5 4 3 2 + 5 2 1 2 + 4 2 = 23 34 17 = 23 2 34
Si nous connaissons le cosinus d'un angle, nous pouvons calculer son sinus en utilisant l'identité trigonométrique de base. Puisque l'angle α formé par les droites n'est pas obtus, alors sin α = 1 - cos 2 α = 1 - 23 2 34 2 = 7 2 34.
Dans ce cas, = a r c cos 23 2 34 = a r c sin 7 2 34.
Réponse : cos α = 23 2 34, sin α = 7 2 34, α = a r c cos 23 2 34 = a r c sin 7 2 34
Examinons le dernier cas - trouver l'angle entre les lignes droites, si nous connaissons les coordonnées du vecteur directeur d'une ligne droite et le vecteur normal de l'autre.
Supposons que la ligne a a un vecteur directeur a → = (a x, a y), et la ligne b est un vecteur normal n b → = (n b x, n b y). Nous devons reporter ces vecteurs du point d'intersection et considérer toutes les options pour leur position relative. Voir sur l'image :

Si la valeur de l'angle entre les vecteurs donnés ne dépasse pas 90 degrés, il s'avère qu'elle complétera l'angle entre a et b à un angle droit.
a →, n b → ^ = 90 ° - α si a →, n b → ^ 90 °.
S'il est inférieur à 90 degrés, nous obtenons ce qui suit :
a →, n b → ^> 90 °, alors a →, n b → ^ = 90 ° + α
En utilisant la règle d'égalité des cosinus d'angles égaux, on écrit :
cos a →, n b → ^ = cos (90 ° - α) = sin α comme a →, n b → ^ ≤ 90 °.
cos a →, n b → ^ = cos 90 ° + α = - sin comme a →, n b → ^> 90 °.
De cette façon,
sin α = cos a →, nb → ^, a →, nb → ^ ≤ 90 ° - cos a →, nb → ^, a →, nb → ^> 90 ° ⇔ sin α = cos a →, nb → ^, a →, nb → ^> 0 - cos a →, nb → ^, a →, nb → ^< 0 ⇔ ⇔ sin α = cos a → , n b → ^
Formulons une conclusion.
Définition 4
Pour trouver le sinus de l'angle entre deux droites se coupant sur le plan, vous devez calculer le module du cosinus de l'angle entre le vecteur directeur de la première droite et le vecteur normal de la seconde.
Écrivons les formules nécessaires. Trouver le sinus d'un angle :
sin α = cos a →, n b → ^ = a x n b x + a y n par y a x 2 + a y 2 n b x 2 + n par y 2
Trouver le coin lui-même :
α = a r c sin = a x n b x + a y n par y a x 2 + a y 2 n b x 2 + n par y 2
Ici a → est le vecteur directeur de la première ligne, et n b → est le vecteur normal de la seconde.
Exemple 3
Deux droites sécantes sont données par les équations x - 5 = y - 6 3 et x + 4 y - 17 = 0. Trouvez l'angle d'intersection.
Solution
Nous prenons les coordonnées de la direction et des vecteurs normaux à partir des équations données. Il s'avère que a → = (- 5, 3) et n → b = (1, 4). On prend la formule α = a r c sin = a x n b x + a y n b y a x 2 + a y 2 n b x 2 + n b y 2 et on considère :
α = a r c sin = - 5 1 + 3 4 (- 5) 2 + 3 2 1 2 + 4 2 = a r c sin 7 2 34
Veuillez noter que nous avons pris les équations du problème précédent et avons obtenu exactement le même résultat, mais d'une manière différente.
Réponse:= a r c sin 7 2 34
Voici une autre façon de trouver l'angle désiré en utilisant les pentes des droites données.
Nous avons une ligne a, qui est donnée dans un système de coordonnées rectangulaires utilisant l'équation y = k 1 x + b 1, et une ligne b, qui est définie comme y = k 2 x + b 2. Ce sont des équations de droites avec une pente. Pour trouver l'angle d'intersection, utilisez la formule :
α = a r c cos k 1 k 2 + 1 k 1 2 + 1 k 2 2 + 1, où k 1 et k 2 sont les pentes des droites données. Pour obtenir cet enregistrement, les formules de détermination de l'angle en fonction des coordonnées des vecteurs normaux ont été utilisées.
Exemple 4
Il y a deux droites sécantes sur le plan, données par les équations y = - 3 5 x + 6 et y = - 1 4 x + 17 4. Calculer l'angle d'intersection.
Solution
Les pentes de nos droites sont k 1 = - 3 5 et k 2 = - 1 4. Ajoutez-les à la formule α = a r c cos k 1 k 2 + 1 k 1 2 + 1 k 2 2 + 1 et calculez :
α = a r c cos - 3 5 - 1 4 + 1 - 3 5 2 + 1 - 1 4 2 + 1 = a r c cos 23 20 34 24 17 16 = a r c cos 23 2 34
Réponse:= a r c cos 23 2 34
Dans les conclusions de ce paragraphe, il est à noter que les formules pour trouver l'angle données ici n'ont pas à être apprises par cœur. Pour ce faire, il suffit de connaître les coordonnées des guides et/ou des vecteurs normaux des droites données et de pouvoir les déterminer à l'aide de différents types d'équations. Mais il vaut mieux se rappeler ou écrire les formules de calcul du cosinus d'un angle.
Comment calculer l'angle entre les lignes qui se coupent dans l'espace
Le calcul d'un tel angle peut se réduire au calcul des coordonnées des vecteurs directeurs et à la détermination de la valeur de l'angle formé par ces vecteurs. Pour de tels exemples, on utilise le même raisonnement que celui que nous avons donné précédemment.
Disons que nous avons un système de coordonnées rectangulaires situé dans l'espace 3D. Il contient deux droites a et b avec un point d'intersection M. Pour calculer les coordonnées des vecteurs directeurs, nous avons besoin de connaître les équations de ces droites. On note les vecteurs directeurs a → = (a x, a y, a z) et b → = (b x, b y, b z). Pour calculer le cosinus de l'angle entre eux, on utilise la formule :
cos α = cos a →, b → ^ = a →, b → a → b → = a x b x + a y b y + a z b z a x 2 + a y 2 + a z 2 b x 2 + b y 2 + b z 2
Pour trouver l'angle lui-même, nous avons besoin de cette formule:
α = a r c cos a x b x + a y b y + a z b z a x 2 + a y 2 + a z 2 b x 2 + b y 2 + b z 2
Exemple 5
Nous avons une ligne droite définie dans l'espace à trois dimensions en utilisant l'équation x 1 = y - 3 = z + 3 - 2. On sait qu'il coupe l'axe O z. Calculer l'angle d'intersection et le cosinus de cet angle.
Solution
Notons l'angle à calculer par la lettre . Écrivons les coordonnées du vecteur de direction pour la première ligne droite - a → = (1, - 3, - 2). Pour l'axe appliqué, nous pouvons prendre le vecteur de coordonnées k → = (0, 0, 1) comme direction. Nous avons reçu les données nécessaires et pouvons les ajouter à la formule requise :
cos α = cos a →, k → ^ = a →, k → a → k → = 1 0 - 3 0 - 2 1 1 2 + (- 3) 2 + (- 2) 2 0 2 + 0 2 + 1 2 = 2 8 = 1 2
En conséquence, nous avons obtenu que l'angle dont nous avons besoin sera égal à a r c cos 1 2 = 45 °.
Réponse: cos = 1 2, = 45 °.
Si vous remarquez une erreur dans le texte, veuillez la sélectionner et appuyez sur Ctrl + Entrée
Soit deux droites l et m sur un plan dans un système de coordonnées cartésiennes données par les équations générales : l : A 1 x + B 1 y + C 1 = 0, m : A 2 x + B 2 y + C 2 = 0
Les vecteurs des normales aux droites données : = (A 1, B 1) - à la droite l,
= (A 2, B 2) - à la ligne m.
Soit j l'angle entre les droites l et m.


Étant donné que les angles dont les côtés sont mutuellement perpendiculaires sont égaux ou totalisent p, alors ![]() , c'est-à-dire cos j =.
, c'est-à-dire cos j =.
Nous avons donc prouvé le théorème suivant.
Théorème. Soit j l'angle entre deux droites du plan, et ces droites sont données dans le repère cartésien par les équations générales A 1 x + B 1 y + C 1 = 0 et A 2 x + B 2 y + C 2 = 0. Alors cos j =  .
.
Des exercices.
1) Générez une formule pour calculer l'angle entre les lignes droites si :
(1) les deux lignes sont définies paramétriquement ; (2) les deux lignes sont données par des équations canoniques ; (3) une ligne droite est donnée paramétriquement, l'autre ligne droite - par l'équation générale; (4) les deux droites sont données par une équation avec une pente.
2) Soit j l'angle entre deux droites du plan, et ces droites sont données par le système de coordonnées cartésiennes par les équations y = k 1 x + b 1 et y = k 2 x + b 2.
Alors tg j =.
3) Explorez la position relative de deux droites, donnée par les équations générales du système de coordonnées cartésiennes, et remplissez le tableau :
La distance d'un point à une ligne droite sur un plan.
Soit la droite l sur le plan dans le repère cartésien donnée par l'équation générale Ax + By + C = 0. Trouvons la distance du point M (x 0, y 0) à la droite l.
La distance du point M à la ligne l est la longueur de la perpendiculaire HM (H Î l, HM ^ l).

Le vecteur et le vecteur normal à la ligne l sont colinéaires, de sorte que | | = | | | | et | | =.
Soit les coordonnées du point H (x, y).
Puisque le point H appartient à la droite l, alors Ax + By + C = 0 (*).
Coordonnées des vecteurs et : = (x 0 - x, y 0 - y), = (A, B).
| | = ![]() =
= ![]() =
= ![]()
(C = -Ax - Par, voir (*))
Théorème. Soit la droite l donnée dans le repère cartésien par l'équation générale Ax + By + C = 0. Alors la distance du point M (x 0, y 0) à cette droite est calculée par la formule : r (M; l) = ![]() .
.
Des exercices.
1) Sortez une formule pour calculer la distance d'un point à une ligne droite, si : (1) la ligne droite est spécifiée paramétriquement ; (2) la droite est donnée par des équations canoniques ; (3) une droite est donnée par une équation avec une pente.
2) Écrivez l'équation du cercle tangent à la droite 3x - y = 0 centrée en Q (-2,4).
3) Écrivez les équations des droites divisant les angles formés par l'intersection des droites 2x + y - 1 = 0 et x + y + 1 = 0, en deux.
§ 27. Définition analytique d'un plan dans l'espace
Définition. Le vecteur normal au plan nous appellerons un vecteur non nul, dont tout représentant est perpendiculaire au plan donné.
Commenter. Il est clair que si au moins un représentant du vecteur est perpendiculaire au plan, alors tous les autres représentants du vecteur sont perpendiculaires à ce plan.
Soit un système de coordonnées cartésiennes donné dans l'espace.
Soit le plan a, = (A, B, C) est le vecteur normal à ce plan, le point M (x 0, y 0, z 0) appartient au plan a.

Pour tout point N (x, y, z) du plan a, les vecteurs et sont orthogonaux, c'est-à-dire que leur produit scalaire est nul : = 0. On écrit la dernière égalité en coordonnées : A (x - x 0) + B (y - y 0) + C (z - z 0) = 0.
Soit -Ax 0 - By 0 - Cz 0 = D, puis Ax + By + Cz + D = 0.
Prenons un point K (x, y) tel que Ax + By + Cz + D = 0. Puisque D = -Ax 0 - By 0 - Cz 0, alors A (x - x 0) + B (y - y 0) + C (z - z 0) = 0. Puisque les coordonnées du segment dirigé = (x - x 0, y - y 0, z - z 0), la dernière égalité signifie que ^, et, par conséquent, K Î a.
Nous avons donc démontré le théorème suivant :
Théorème. Tout plan de l'espace dans un système de coordonnées cartésiennes peut être spécifié par une équation de la forme Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 0), où (A, B, C) sont les coordonnées du vecteur normal à ce plan.
L'inverse est également vrai.
Théorème. Toute équation de la forme Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 0) dans le système de coordonnées cartésiennes définit un certain plan, tandis que (A, B, C) sont les coordonnées de la normale vecteur à ce plan.
Preuve.
Soit un point M (x 0, y 0, z 0) tel que Ax 0 + By 0 + Cz 0 + D = 0 et un vecteur = (A, B, C) (≠ q).
Un plan (et d'ailleurs un seul) passe par le point M perpendiculaire au vecteur. Par le théorème précédent, ce plan est donné par l'équation Ax + By + Cz + D = 0.
Définition. Une équation de la forme Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 0) est appelée équation générale du plan.
Exemple.
Écrivons l'équation du plan passant par les points M (0,2,4), N (1, -1,0) et K (-1,0,5).
1. Trouvez les coordonnées du vecteur normal au plan (MNK). Puisque le produit vectoriel ´ est orthogonal aux vecteurs non colinéaires et, le vecteur est colinéaire ´.
= (1, -3, -4), = (-1, -2, 1);
´ =  ,
,
´ = (-11, 3, -5).
Ainsi, comme vecteur normal, nous prenons le vecteur = (-11, 3, -5).
2. On utilise maintenant les résultats du premier théorème :
équation du plan donné A (x - x 0) + B (y - y 0) + C (z - z 0) = 0, où (A, B, C) sont les coordonnées du vecteur normal, (x 0 , y 0, z 0) - coordonnées d'un point situé dans un plan (par exemple, le point M).
11 (x - 0) + 3 (y - 2) - 5 (z - 4) = 0
11x + 3y - 5z + 14 = 0
Réponse : -11x + 3y - 5z + 14 = 0.
Des exercices.
1) Écrire l'équation du plan si
(1) le plan passe par le point M (-2,3,0) parallèle au plan 3x + y + z = 0;
(2) le plan contient l'axe (Ox) et est perpendiculaire au plan x + 2y - 5z + 7 = 0.
2) Écris l'équation du plan passant par ces trois points.
§ 28. Définition analytique d'un demi-espace *
Commenter*... Qu'un avion soit réparé. En dessous de demi-espace nous entendons un ensemble de points situés d'un côté d'un plan donné, c'est-à-dire deux points situés dans un demi-espace, si le segment qui les relie ne coupe pas ce plan. Cet avion s'appelle la limite de ce demi-espace... L'union de ce plan et du demi-espace s'appellera demi-espace fermé.
Soit le système de coordonnées cartésiennes fixé dans l'espace.
Théorème. Soit le plan a donné par l'équation générale Ax + By + Cz + D = 0. Alors l'un des deux demi-espaces dans lesquels le plan a divise l'espace est donné par l'inégalité Ax + By + Cz + D> 0 , et le second demi-espace est donné par l'inégalité Ax + By + Cz + D< 0.
Preuve.
Laissons de côté le vecteur normal = (A, B, C) au plan a du point M (x 0, y 0, z 0) situé sur ce plan : =, M Î a, MN ^ a. Divisez le plan en deux demi-espaces : b 1 et b 2. Il est clair que le point N appartient à l'un de ces demi-espaces. Sans perte de généralité, nous supposerons que N Î b 1.

Montrons que le demi-espace b 1 est donné par l'inégalité Ax + By + Cz + D> 0.
1) Prenons un point K (x, y, z) dans le demi-espace b 1. L'angle л NMK est l'angle entre les vecteurs et est aigu, donc le produit scalaire de ces vecteurs est positif :> 0. On écrit cette inégalité en coordonnées : A (x - x 0) + B (y - y 0) + C (z - z 0) > 0, c'est-à-dire Ax + By + Cy - Ax 0 - By 0 - C z 0> 0.
Puisque M Î b 1, alors Ax 0 + By 0 + C z 0 + D = 0, donc -Ax 0 - By 0 - C z 0 = D. Par conséquent, la dernière inégalité peut s'écrire : Ax + By + Cz +D> 0.
2) Prenons un point L (x, y) tel que Ax + By + Cz + D> 0.
On réécrit l'inégalité en remplaçant D par (-Ax 0 - By 0 - C z 0) (puisque M Î b 1, alors Ax 0 + By 0 + C z 0 + D = 0) : A (x - x 0) + B (y - y 0) + C (z - z 0)> 0.
Un vecteur de coordonnées (x - x 0, y - y 0, z - z 0) est un vecteur, donc l'expression A (x - x 0) + B (y - y 0) + C (z - z 0) peut être compris comme le produit scalaire des vecteurs et. Puisque le produit scalaire des vecteurs et est positif, l'angle entre eux est aigu et le point L Î b 1.
De même, on peut prouver que le demi-espace b 2 est donné par l'inégalité Ax + By + Cz + D< 0.
Remarques.
1) Il est clair que la preuve ci-dessus ne dépend pas du choix du point M dans le plan a.
2) Il est clair qu'un même demi-espace peut être spécifié par différentes inégalités.
L'inverse est également vrai.
Théorème. Toute inégalité linéaire de la forme Ax + By + Cz + D > 0 (ou Ax + By + Cz + D< 0) (A 2 + B 2 + C 2 ≠ 0) задает в пространстве в декартовой системе координат полупространство с границей Ax + By + Cz + D = 0.
Preuve.
L'équation Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 0) dans l'espace définit un certain plan a (voir §…). Comme prouvé dans le théorème précédent, l'un des deux demi-espaces dans lesquels le plan divise l'espace est donné par l'inégalité Ax Ax + By + Cz + D> 0.
Remarques.
1) Il est clair qu'un demi-espace fermé peut être spécifié par une inégalité linéaire non stricte, et toute inégalité linéaire non stricte dans un système de coordonnées cartésiennes définit un demi-espace fermé.
2) Tout polyèdre convexe peut être défini comme l'intersection de demi-espaces fermés (dont les frontières sont des plans contenant les faces du polyèdre), c'est-à-dire analytiquement - par un système d'inégalités linéaires non strictes.
Des exercices.
1) Démontrer les deux théorèmes présentés pour un système de coordonnées affine arbitraire.
2) L'inverse est-il vrai que tout système d'inégalités linéaires non strictes définit un polygone convexe ?
L'exercice.1) Étudiez la position relative des deux plans, donnée par les équations générales du système de coordonnées cartésiennes, et remplissez le tableau.
Définition. Si deux droites y = k 1 x + b 1, y = k 2 x + b 2 sont données, alors l'angle aigu entre ces droites sera défini comme
Deux droites sont parallèles si k 1 = k 2. Deux droites sont perpendiculaires si k 1 = -1 / k 2.
Théorème. Les droites Ax + Vy + C = 0 et A 1 x + B 1 y + C 1 = 0 sont parallèles lorsque les coefficients proportionnels A 1 = λA, B 1 = λB. Si aussi С 1 = λС, alors les droites coïncident. Les coordonnées du point d'intersection de deux droites sont trouvées comme solution du système d'équations de ces droites.
Equation d'une droite passant par un point donné
Perpendiculaire à cette ligne
Définition. La droite passant par le point M 1 (x 1, y 1) et perpendiculaire à la droite y = kx + b est représentée par l'équation :

Distance du point à la ligne
Théorème. Si un point M (x 0, y 0) est donné, alors la distance à la droite Ax + Vy + C = 0 est déterminée comme
 .
.
Preuve. Soit le point M 1 (x 1, y 1) la base de la perpendiculaire tombant du point M sur une droite donnée. Alors la distance entre les points M et M 1 :
![]() (1)
(1)
Les coordonnées x 1 et y 1 peuvent être trouvées comme solution du système d'équations :

La deuxième équation du système est l'équation d'une droite passant par un point donné M 0 perpendiculaire à une droite donnée. Si on transforme la première équation du système sous la forme :
A (x - x 0) + B (y - y 0) + Ax 0 + Par 0 + C = 0,
alors, en résolvant, on obtient :

En substituant ces expressions dans l'équation (1), on trouve :
Le théorème est prouvé.
Exemple... Déterminer l'angle entre les droites : y = -3 x + 7 ; y = 2 x + 1.
k1 = -3; k2 = 2 ; tgφ =  ; = p / 4.
; = p / 4.
Exemple... Montrez que les droites 3x - 5y + 7 = 0 et 10x + 6y - 3 = 0 sont perpendiculaires.
Solution... On trouve : k 1 = 3/5, k 2 = -5/3, k 1 * k 2 = -1, donc les droites sont perpendiculaires.
Exemple... Les sommets du triangle A (0 ; 1), B (6 ; 5), C (12 ; -1) sont donnés. Trouvez l'équation de la hauteur tirée du sommet C.
Solution... On trouve l'équation du côté AB :  ; 4 x = 6 y - 6 ;
; 4 x = 6 y - 6 ;
2 x - 3 y + 3 = 0 ;
L'équation de hauteur requise est : Ax + By + C = 0 ou y = kx + b. k =. Alors y =. Parce que la hauteur passe par le point C, alors ses coordonnées satisfont à cette équation :  d'où b = 17. Total :.
d'où b = 17. Total :. 
Réponse : 3 x + 2 y - 34 = 0.
Équation d'une droite passant par un point donné dans une direction donnée. Équation d'une droite passant par deux points donnés. L'angle entre deux droites. La condition de parallélisme et de perpendicularité de deux droites. Détermination du point d'intersection de deux droites
1. Equation d'une droite passant par un point donné UNE(X 1 , oui 1) dans une direction donnée, déterminée par la pente k,
oui - oui 1 = k(X - X 1). (1)
Cette équation définit un faisceau de droites passant par le point UNE(X 1 , oui 1), qui est appelé le centre du faisceau.
2. Equation d'une droite passant par deux points : UNE(X 1 , oui 1) et B(X 2 , oui 2) s'écrit comme suit :
La pente d'une droite passant par deux points donnés est déterminée par la formule
3. Angle entre les lignes droites UNE et B appelé l'angle selon lequel vous devez tourner la première ligne droite UNE autour du point d'intersection de ces lignes dans le sens antihoraire jusqu'à ce qu'il coïncide avec la deuxième ligne B... Si deux droites sont données par des équations avec une pente
oui = k 1 X + B 1 ,
oui = k 2 X + B 2 , (4)
alors l'angle entre eux est déterminé par la formule
Notez que dans le numérateur de la fraction, la pente de la première droite est soustraite de la pente de la deuxième droite.
Si les équations de la droite sont données sous forme générale
UNE 1 X + B 1 oui + C 1 = 0,
UNE 2 X + B 2 oui + C 2 = 0, (6)
l'angle entre eux est déterminé par la formule
4. Conditions de parallélisme de deux droites :
a) Si les droites sont données par les équations (4) avec la pente, alors la condition nécessaire et suffisante de leur parallélisme consiste dans l'égalité de leurs pentes :
k 1 = k 2 . (8)
b) Pour le cas où les droites sont données par des équations de forme générale (6), la condition nécessaire et suffisante pour leur parallélisme est que les coefficients aux coordonnées courantes correspondantes dans leurs équations soient proportionnels, c'est-à-dire
5. Conditions de perpendicularité de deux droites :
a) Dans le cas où les droites sont données par les équations (4) avec la pente, la condition nécessaire et suffisante pour leur perpendicularité est que leurs pentes soient de grandeur réciproque et de signe opposé, c'est-à-dire
Cette condition peut aussi s'écrire sous la forme
k 1 k 2 = -1. (11)
b) Si les équations des droites sont données sous la forme générale (6), alors la condition de leur perpendicularité (nécessaire et suffisante) consiste dans la réalisation de l'égalité
UNE 1 UNE 2 + B 1 B 2 = 0. (12)
6. Les coordonnées du point d'intersection de deux droites sont trouvées en résolvant le système d'équations (6). Les droites (6) se coupent si et seulement si
1. Écrivez les équations des droites passant par le point M, dont l'une est parallèle et l'autre perpendiculaire à une droite donnée l.
Problème 1
Trouver le cosinus de l'angle entre les droites $ \ frac (x + 3) (5) = \ frac (y-2) (- 3) = \ frac (z-1) (4) $ et $ \ left \ (\ begin (array ) (c) (x = 2 \ cdot t-3) \\ (y = -t + 1) \\ (z = 3 \ cdot t + 5) \ end (array) \ right. $ .
Soit deux droites données dans l'espace : $ \ frac (x-x_ (1)) (m_ (1)) = \ frac (y-y_ (1)) (n_ (1)) = \ frac (z-z_ ( 1 )) (p_ (1)) $ et $ \ frac (x-x_ (2)) (m_ (2)) = \ frac (y-y_ (2)) (n_ (2)) = \ frac (z - z_ (2)) (p_ (2)) $. Choisissez un point arbitraire dans l'espace et dessinez à travers lui deux lignes auxiliaires parallèles aux données. L'angle entre ces lignes est l'un des deux coins adjacents formés par des lignes de construction. Le cosinus de l'un des angles entre les droites peut être trouvé en utilisant la formule bien connue $\cos\phi =\frac (m_ (1)\cdot m_ (2) + n_ (1)\cdot n_ (2) + p_ (1) \ cdot p_ ( 2)) (\ sqrt (m_ (1) ^ (2) + n_ (1) ^ (2) + p_ (1) ^ (2)) \ cdot \ sqrt (m_ ( 2) ^ (2) + n_ ( 2) ^ (2) + p_ (2) ^ (2))) $. Si la valeur $\cos\phi> 0 $, alors un angle aigu entre les droites est obtenu, si $\cos\phi
Équations canoniques de la première ligne : $ \ frac (x + 3) (5) = \ frac (y-2) (- 3) = \ frac (z-1) (4) $.
Les équations canoniques de la deuxième droite peuvent être obtenues à partir des paramétriques :
\ \ \
Ainsi, les équations canoniques de cette droite sont : $ \ frac (x + 3) (2) = \ frac (y-1) (- 1) = \ frac (z-5) (3) $.
On calcule :
\ [\ cos \ phi = \ frac (5 \ cdot 2+ \ left (-3 \ right) \ cdot \ left (-1 \ right) +4 \ cdot 3) (\ sqrt (5 ^ (2) + \ gauche (-3 \ droite) ^ (2) + 4 ^ (2)) \ cdot \ sqrt (2 ^ (2) + \ gauche (-1 \ droite) ^ (2) + 3 ^ (2))) = \ frac (25) (\ sqrt (50) \ cdot \ sqrt (14)) \ approx 0.9449. \]
Tâche 2
La première ligne passe par les points donnés $ A \ gauche (2, -4, -1 \ droite) $ et $ B \ gauche (-3,5,6 \ droite) $, la deuxième ligne passe par les points donnés $ C \ gauche (1, -2,8 \ droite) $ et $ D \ gauche (6,7, -2 \ droite) $. Trouvez la distance entre ces lignes.
Soit une droite perpendiculaire aux droites $ AB $ et $ CD $ et les coupe aux points $ M $ et $ N $, respectivement. Dans ces conditions, la longueur du segment $ MN $ est égale à la distance entre les lignes $ AB $ et $ CD $.
On construit le vecteur $ \ overline (AB) $ :
\ [\ overline (AB) = \ gauche (-3-2 \ droite) \ cdot \ barre (i) + \ gauche (5- \ gauche (-4 \ droite) \ droite) \ cdot \ barre (j) + \gauche (6- \gauche (-1\droite)\droite)\cdot\barre (k) = - 5\cdot\barre (i) +9\cdot\barre (j) +7\cdot\barre (k ). \]
Soit le segment représentant la distance entre les lignes passer par le point $ M \ left (x_ (M), y_ (M), z_ (M) \ right) $ sur la ligne $ AB $.
On construit le vecteur $ \ overline (AM) $ :
\ [\ overline (AM) = \ left (x_ (M) -2 \ right) \ cdot \ barre (i) + \ left (y_ (M) - \ left (-4 \ right) \ right) \ cdot \ barre (j) + \ gauche (z_ (M) - \ gauche (-1 \ droite) \ droite) \ cdot \ barre (k) = \] \ [= \ gauche (x_ (M) -2 \ droite) \ cdot \ barre (i) + \ gauche (y_ (M) +4 \ droite) \ cdot \ barre (j) + \ gauche (z_ (M) +1 \ droite) \ cdot \ barre (k). \]
Les vecteurs $ \ overline (AB) $ et $ \ overline (AM) $ sont les mêmes, donc ils sont colinéaires.
On sait que si les vecteurs $ \ overline (a) = x_ (1) \ cdot \ overline (i) + y_ (1) \ cdot \ overline (j) + z_ (1) \ cdot \ overline (k) $ et $ \ overline (b) = x_ (2) \ cdot \ overline (i) + y_ (2) \ cdot \ overline (j) + z_ (2) \ cdot \ overline (k) $ sont colinéaires, alors leurs coordonnées sont proportionnel, alors est $ \ frac (x _ ((\ it 2))) ((\ it x) _ ((\ it 1))) = \ frac (y _ ((\ it 2))) ((\ it y) _ ( (\ it 1))) = \ frac (z _ ((\ it 2))) ((\ it z) _ ((\ it 1))) $.
$ \ frac (x_ (M) -2) (- 5) = \ frac (y_ (M) +4) (9) = \ frac (z_ (M) +1) (7) = m $, où $ m $ est le résultat de la division.
De là on obtient : $ x_ (M) -2 = -5 \ cdot m $; $ y_ (M) + 4 = 9 \ cdot m $; $ z_ (M) + 1 = 7 \ cdot m $.
Enfin, on obtient des expressions pour les coordonnées du point $ M $ :
On construit le vecteur $ \ overline (CD) $ :
\ [\ overline (CD) = \gauche (6-1\droite)\cdot\barre (i) +\gauche (7-\gauche (-2\droite)\droite)\cdot\barre (j) +\ gauche (-2-8\droite)\cdot\barre (k) = 5\cdot\barre (i) +9\cdot\barre (j) -10\cdot\barre (k).\]
Soit le segment représentant la distance entre les droites passer par le point $ N \ left (x_ (N), y_ (N), z_ (N) \ right) $ sur la droite $ CD $.
On construit le vecteur $ \ overline (CN) $ :
\ [\ overline (CN) = \ left (x_ (N) -1 \ right) \ cdot \ barre (i) + \ left (y_ (N) - \ left (-2 \ right) \ right) \ cdot \ barre (j) + \ gauche (z_ (N) -8 \ droite) \ cdot \ barre (k) = \] \ [= \ gauche (x_ (N) -1 \ droite) \ cdot \ barre (i) + \gauche (y_ (N) +2\droite)\cdot\barre (j)+\gauche (z_(N)-8\droite)\cdot\barre (k).\]
Les vecteurs $ \ overline (CD) $ et $ \ overline (CN) $ coïncident, donc ils sont colinéaires. On applique la condition de colinéarité des vecteurs :
$ \ frac (x_ (N) -1) (5) = \ frac (y_ (N) +2) (9) = \ frac (z_ (N) -8) (- 10) = n $, où $ n $ est le résultat de la division.
De là on obtient : $ x_ (N) -1 = 5 \ cdot n $; $ y_ (N) + 2 = 9 \ cdot n $; $ z_ (N) -8 = -10 \ cdot n $.
Enfin, on obtient des expressions pour les coordonnées du point $ N $ :
On construit le vecteur $ \ overline (MN) $ :
\ [\ overline (MN) = \ left (x_ (N) -x_ (M) \ right) \ cdot \ bar (i) + \ left (y_ (N) -y_ (M) \ right) \ cdot \ bar (j) +\gauche (z_ (N) -z_ (M)\droite)\cdot\barre (k).\]
Substituez les expressions pour les coordonnées des points $ M $ et $ N $ :
\ [\ overline (MN) = \ left (1 + 5 \ cdot n- \ left (2-5 \ cdot m \ right) \ right) \ cdot \ barre (i) + \] \ [+ \ left (- 2 + 9\cdot n-\gauche (-4+9\cdot m\right)\right)\cdot\bar (j)+\gauche (8-10\cdot n-\gauche (-1+7\cdot m\droite)\droite)\cdot\barre (k).\]
Après avoir terminé les étapes, nous obtenons:
\ [\ overline (MN) = \ left (-1 + 5 \ cdot n + 5 \ cdot m \ right) \ cdot \ barre (i) + \ left (2 + 9 \ cdot n-9 \ cdot m \ right )\cdot\barre (j) +\gauche (9-10\cdot n-7\cdot m\right)\cdot\barre(k).\]
Puisque les droites $ AB $ et $ MN $ sont perpendiculaires, le produit scalaire des vecteurs correspondants est égal à zéro, c'est-à-dire $ \ overline (AB) \ cdot \ overline (MN) = 0 $ :
\ [- 5\cdot\gauche (-1 + 5\cdot n+5\cdot m\right) +9\cdot\gauche (2+9\cdot n-9\cdot m\right) +7\cdot\ gauche (9-10 \ cdot n-7 \ cdot m \ droite) = 0; \] \
Après avoir terminé les étapes, nous obtenons la première équation pour déterminer $ m $ et $ n $ : 155 $ \ cdot m + 14 \ cdot n = 86 $.
Puisque les droites $ CD $ et $ MN $ sont perpendiculaires, le produit scalaire des vecteurs correspondants est égal à zéro, c'est-à-dire $ \ overline (CD) \ cdot \ overline (MN) = 0 $ :
\ \ [- 5 + 25 \ cdot n + 25 \ cdot m + 18 + 81 \ cdot n-81 \ cdot m-90 + 100 \ cdot n + 70 \ cdot m = 0. \]
Après avoir terminé les étapes, nous obtenons la deuxième équation pour déterminer $ m $ et $ n $ : 14 $ \ cdot m + 206 \ cdot n = 77 $.
Trouver $ m $ et $ n $ en résolvant le système d'équations $ \ left \ (\ begin (array) (c) (155 \ cdot m + 14 \ cdot n = 86) \\ (14 \ cdot m + 206 \ cdot n = 77) \ end (array) \ right. $.
Nous appliquons la méthode de Cramer :
\ [\ Delta = \ left | \ begin (array) (cc) (155) & (14) \\ (14) & (206) \ end (array) \ right | = 31734; \] \ [\ Delta _ (m) = \ gauche | \ début (tableau) (cc) (86) & (14) \\ (77) & (206) \ fin (tableau) \ droite | = 16638; \] \ [\ Delta _ (n) = \ gauche | \ début (tableau) (cc) (155) & (86) \\ (14) & (77) \ fin (tableau) \ droite | = 10731; \ ] \
Trouvez les coordonnées des points $ M $ et $ N $ :
\ \
Enfin:
Enfin, on écrit le vecteur $ \ overline (MN) $ :
$\overline (MN) =\gauche (2.691-\gauche (-0.6215\right)\right)\cdot\barre (i) +\gauche (1.0438-0.7187\right)\cdot\bar (j)+\gauche (4.618-2.6701\right)\cdot\bar (k)$ ou $\overline (MN) = 3.3125\cdot\bar (i) +0.3251\cdot\bar(j) +1.9479\cdot\bar(k)$ .
La distance entre les droites $ AB $ et $ CD $ est la longueur du vecteur $ \ overline (MN) $ : $ d = \ sqrt (3,3125 ^ (2) + 0,3251 ^ (2) + 1,9479 ^ (2) ) \ environ 3,8565 $ lin. unités