„Plėšrūno-grobio“ situacijos modelis
Panagrinėkime matematinį dviejų biologinių rūšių (populiacijų), sąveikaujančių viena su kita pagal „plėšrūno-grobio“ tipą (vilkai ir triušiai, lydekos ir karosai ir kt.), sambūvio dinamikos modelį, vadinamą Volteru. Lotkos modelis. Pirmiausia jį gavo A. Lotka (1925), o kiek vėliau, nepriklausomai nuo Lotkos, panašius ir sudėtingesnius modelius sukūrė italų matematikas V. Volterra (1926), kurio darbais faktiškai padėjo pamatus t. vadinama matematine ekologija.
Tarkime, kad yra dvi biologinės rūšys, kurios gyvena kartu izoliuotoje aplinkoje. Tai daro prielaidą:
- 1. Auka gali rasti pakankamai maisto pragyventi;
- 2. Kiekvieno aukos susitikimo su plėšrūnu metu pastarasis auką nužudo.
Tikslumo dėlei juos pavadinsime karosais ir lydekomis. Leisti būti
sistemos būklę lemia kiekiai x(t) Ir y(t)– karosų ir lydekų skaičius šiuo metu G. Norėdami gauti matematines lygtis, kurios apytiksliai apibūdina populiacijos dinamiką (pokytį laikui bėgant), elgiamės taip.
Kaip ir ankstesniame gyventojų skaičiaus augimo modelyje (žr. 1.1 skyrių), aukoms turime lygtį
kur bet> 0 (gimstamumas viršija mirtingumą)
Koeficientas bet grobio padidėjimas priklauso nuo plėšrūnų skaičiaus (mažėja jiems didėjant). Paprasčiausiu atveju a- a - fjy (a>0, p>0). Tada grobio populiacijos dydžiui turime diferencialinę lygtį
Plėšrūnų populiacijai turime lygtį

kur b>0 (mirtingumas viršija gimstamumą).
Koeficientas b Plėšrūnų išnykimas sumažėja, jei yra grobio, kuriuo galima maitintis. Paprasčiausiu atveju galima imti b - y -Sx (y > 0, S> 0). Tada plėšrūnų populiacijos dydžiui gauname diferencialinę lygtį

Taigi (1.5) ir (1.6) lygtys reprezentuoja nagrinėjamos populiacijos sąveikos problemos matematinį modelį. Šiame modelyje kintamieji x,y- sistemos būsena, o koeficientai apibūdina jos struktūrą. Netiesinė sistema (1.5), (1.6) yra Volterio-Lotkos modelis.
(1.5) ir (1.6) lygtis turėtų būti papildyta pradinėmis sąlygomis - nurodytomis pradinių populiacijų reikšmėmis.
Dabar panagrinėkime sukonstruotą matematinį modelį.
Sukurkime sistemos (1.5), (1.6) fazinį portretą (pagal uždavinio reikšmę X> 0, v > 0). Padalinę (1.5) lygtį iš lygties (1.6), gauname lygtį su atskiriamais kintamaisiais
Naudodami šią lygtį turėsime
Ryšys (1.7) pateikia fazių trajektorijų lygtį numanoma forma. Sistema (1.5), (1.6) turi stacionarią būseną, nustatytą iš

Iš lygčių (1.8) gauname (nes l* F 0, y* F 0)
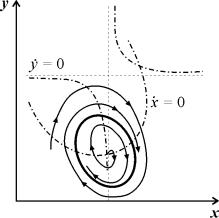
Lygybės (1.9) nustato pusiausvyros padėtį fazinėje plokštumoje (taške APIE)(1.6 pav.).

Judėjimo pagal fazės trajektoriją kryptį galima nustatyti remiantis tokiais svarstymais. Tegul mažai karpių. g.u. x ~ 0, tada iš (1.6) lygties y
Visos fazių trajektorijos (išskyrus tašką 0) uždaros kreivės, apimančios pusiausvyros padėtį. Pusiausvyros būsena atitinka pastovų x' ir y' karosų ir lydekų skaičių. Karpiai veisiasi, lydekos juos ėda, išnyksta, bet tų ir kitų skaičius nesikeičia. "Uždarosios fazės trajektorijos atitinka periodinį karosų ir lydekų skaičiaus kitimą. Be to, trajektorija, kuria juda fazės taškas, priklauso nuo pradinių sąlygų. Apsvarstykite, kaip fazės trajektorija keičiasi būsena. Tegul taškas yra savo pozicijoje BET(1.6 pav.). Karpių čia mažai, lydekų daug; lydekos neturi ką valgyti, o jos pamažu nyksta ir beveik
visiškai išnykti. Bet karosų skaičius taip pat sumažėja beveik iki nulio ir
tik vėliau, kai lydekos tapo mažiau nei adresu, prasideda karosų gausėjimas; jų augimo tempas didėja ir jų skaičius didėja – taip nutinka maždaug iki taško IN. Tačiau padidėjus karosų skaičiui, sulėtėja šukų išnykimo procesas ir jų skaičius pradeda augti (maisto yra daugiau) - sklypas Saulė. Be to, lydekų yra daug, jos minta karosais ir suėda beveik visas (skyrius CD). Po to lydekos vėl pradeda nykti ir procesas kartojasi maždaug 5-7 metus. Ant pav. 1.7 kokybiškai sukonstruotos karosų ir lydekų skaičiaus kitimo, priklausomai nuo laiko, kreivės. Kreivių maksimumai kaitaliojasi, o lydekų gausumo maksimumai atsilieka nuo karosų.

Toks elgesys būdingas įvairioms plėšrūnų ir grobio sistemoms. Dabar interpretuokime gautus rezultatus.
Nepaisant to, kad svarstomas modelis yra pats paprasčiausias ir iš tikrųjų viskas vyksta daug sudėtingiau, tai leido paaiškinti kai kuriuos paslaptingus gamtoje egzistuojančius dalykus. Suprantami meškeriotojų pasakojimai apie laikotarpius, kai „lydekos pačios šoka į rankas“, aiškinamasi lėtinių ligų dažnis ir pan.
Atkreipiame dėmesį į dar vieną įdomią išvadą, kurią galima padaryti iš Fig. 1.6. Jei taške R yra greitas lydekų gaudymas (kita terminija - vilkų šaudymas), tada sistema "šokinėja" į tašką Q, ir tolesnis judėjimas vyksta mažesne uždara trajektorija, ko intuityviai tikimasi. Jeigu taške sumažintume lydekų skaičių R, tada sistema eis į tašką S, ir tolesnis judėjimas vyks didesne trajektorija. Virpesių amplitudė padidės. Tai prieštarauja intuicijai, bet kaip tik paaiškina tokį reiškinį: dėl vilkų šaudymo laikui bėgant jų skaičius didėja. Taigi fotografavimo momento pasirinkimas šiuo atveju yra svarbus.
Tarkime, kad dvi vabzdžių populiacijos (pavyzdžiui, amaras ir boružėlė, mintanti amarais) buvo natūralioje pusiausvyroje. x-x*, y = y*(taškas APIE ant pav. 1.6). Apsvarstykite vieno žudančio insekticido panaudojimo poveikį x> 0 nukentėjusiųjų ir y > 0 plėšrūnų jų visiškai nesunaikinus. Abiejų populiacijų skaičiaus sumažėjimas lemia tai, kad atstovaujantis taškas iš padėties APIE„šokinėja“ arčiau kilmės, kur x > 0, y 0 (1.6 pav.) Iš to išplaukia, kad veikiant insekticidui, skirtam grobiui (amarams) sunaikinti, daugėja grobio (amarų), mažėja plėšrūnų (boružių). Pasirodo, plėšrūnų skaičius gali tapti toks mažas, kad dėl kitų priežasčių (sausros, ligų ir pan.) jie visiškai išnyks. Taigi, naudojant insekticidus (nebent jie beveik visiškai sunaikina kenksmingus vabzdžius) galiausiai didėja tų vabzdžių, kurių skaičių kontroliavo kiti plėšrūnai, populiacija. Tokie atvejai aprašyti knygose apie biologiją.
Apskritai aukų skaičiaus augimo tempas bet priklauso ir nuo L" ir nuo y: bet= a(x, y) (dėl plėšrūnų buvimo ir maisto apribojimų).
Nedidelį modelio pakeitimą (1.5), (1.6) dešiniosiose lygčių pusėse pridedami maži terminai (atsižvelgiant į, pavyzdžiui, karosų konkurenciją dėl maisto ir lydekų konkurenciją dėl karosų)
čia 0 f.i « 1.
Tokiu atveju modeliui (1.5), (1.6) galiojanti išvada apie proceso periodiškumą (sistemos grįžimas į pradinę būseną) netenka galios. Priklausomai nuo smulkių pataisymų tipo / ir g Situacijos, parodytos fig. 1.8.

(1) atveju pusiausvyros būsena APIE stabiliai. Bet kokioms kitoms pradinėms sąlygoms būtent ši vertė nustatoma po pakankamai ilgo laiko.
(2) atveju sistema „eina į grindis“. Stacionari būklė nestabili. Tokia sistema ilgainiui patenka į tokį verčių diapazoną X ir y, kad modelis nebetinkamas.
(3) atveju sistemoje su nestabilia stacionaria būsena APIE periodinis režimas nustatomas laikui bėgant. Priešingai nei pirminiame modelyje (1.5), (1.6), šiame modelyje pastovus periodinis režimas nepriklauso nuo pradinių sąlygų. Iš pradžių mažas nukrypimas nuo pastovios būsenos APIE veda prie nedidelių svyravimų APIE, kaip ir Volterra-Lotka modelyje, bet gerai apibrėžtos (ir nepriklausomos nuo nuokrypio mažumo) amplitudės virpesiams.
Į IR. Arnoldas Volterra-Lotka modelį vadina standžiu, nes mažas jo pakeitimas gali lemti išvadas, kurios skiriasi nuo pateiktų aukščiau. Norėdami nuspręsti, kuri iš situacijų, nurodytų pav. 1.8 yra įdiegtas šioje sistemoje, būtina papildoma informacija apie sistemą (apie smulkių pataisymų tipą / ir g).
Dviejų rūšių sąveikos modeliai
Volteros hipotezės. Analogijos su chemine kinetika. Volterra sąveikos modeliai. Sąveikos tipų klasifikacija Konkurencija. Plėšrūnas-grobis. Apibendrinti rūšių sąveikos modeliai . Kolmogorovo modelis. MacArthuro dviejų rūšių vabzdžių sąveikos modelis. Parametrinis ir Bazykin sistemos faziniai portretai.
Šiuolaikinės matematinės populiacijų teorijos pradininku pagrįstai laikomas italų matematikas Vito Volterra, sukūręs matematinę biologinių bendrijų teoriją, kurios aparatas yra diferencialinės ir integro-diferencialinės lygtys.(Vito Volterra. Lecons sur la Theorie Mathematique de la Lutte pour la Vie. Paris, 1931). Vėlesniais dešimtmečiais populiacijos dinamika vystėsi daugiausia pagal šioje knygoje išsakytas idėjas. Volterros knygos vertimas į rusų kalbą buvo išleistas 1976 m. pavadinimu „Matematinė kovos už būvį teorija“ su Yu.M. Svireževas, kuriame aptariama matematinės ekologijos raidos istorija 1931–1976 m.
Volterros knyga parašyta taip, kaip rašomos knygos apie matematiką. Pirmiausia suformuluojamos kai kurios prielaidos apie matematinius objektus, kurie turėtų būti tiriami, o tada atliekamas matematinis šių objektų savybių tyrimas.
Volterros tyrinėtos sistemos susideda iš dviejų ar daugiau rūšių. Kai kuriais atvejais atsižvelgiama į sunaudoto maisto atsargas. Šių rūšių sąveiką apibūdinančios lygtys yra pagrįstos šiais vaizdiniais.
Volteros hipotezės
1. Maisto galima įsigyti neribotais kiekiais, arba jo tiekimas laikui bėgant yra griežtai reguliuojamas.
2. Kiekvienos rūšies individai miršta taip, kad per laiko vienetą žūva pastovi dalis esamų individų.
3. Plėšriosios rūšys valgo grobį, o per laiko vienetą suvalgyto grobio skaičius visada yra proporcingas tikimybei sutikti šių dviejų rūšių individus, t.y. plėšrūnų skaičiaus ir grobio skaičiaus sandauga.
4. Jei maisto yra ribotas kiekis ir kelios rūšys, galinčios jį suvartoti, tai rūšies maisto dalis, suvartota per laiko vienetą, yra proporcinga šios rūšies individų skaičiui, imant tam tikrą koeficientą, priklausantį apie rūšis (tarprūšinės konkurencijos modeliai).
5. Jei rūšis minta maistu, kurio galima gauti neribotais kiekiais, rūšių skaičiaus padidėjimas per laiko vienetą yra proporcingas rūšies skaičiui.
6. Jei rūšis minta maistu, kurio yra ribotai, tai jos dauginimąsi reguliuoja maisto suvartojimo norma, t.y. per laiko vienetą padidėjimas proporcingas suvalgyto maisto kiekiui.
Analogijos su chemine kinetika
Šios hipotezės turi artimų paralelių su chemine kinetika. Populiacijos dinamikos lygtyse, kaip ir cheminės kinetikos lygtyse, naudojamas „susidūrimų principas“, kai reakcijos greitis proporcingas reaguojančių komponentų koncentracijų sandaugai.
Iš tiesų, pagal Volteros hipotezes, greitis procesas kiekvienos rūšies išnykimas proporcingas rūšies gausumui. Cheminėje kinetikoje tai atitinka kai kurios medžiagos monomolekulinio skilimo reakciją, o matematiniame modelyje – neigiamus tiesinius narius dešinėje lygčių pusėje.
Remiantis cheminės kinetikos sampratomis, dviejų medžiagų sąveikos bimolekulinės reakcijos greitis yra proporcingas šių medžiagų susidūrimo tikimybei, t.y. jų koncentracijos sandauga. Lygiai taip pat, vadovaujantis Volteros hipotezėmis, plėšrūnų dauginimosi greitis (grobio mirtis) yra proporcingas plėšrūno ir grobio susidūrimo tikimybei, t.y. jų skaičių sandauga. Abiem atvejais modelio sistemoje dešinėje atitinkamų lygčių pusėse atsiranda dvilinijiniai terminai.
Galiausiai tiesiniai teigiami dėmenys dešinėje Volteros lygčių pusėje, atitinkantys gyventojų skaičiaus augimą neribotomis sąlygomis, atitinka autokatalizinius cheminių reakcijų terminus. Toks lygčių panašumas cheminiuose ir ekologiniuose modeliuose leidžia populiacijos kinetikos matematiniam modeliavimui taikyti tuos pačius tyrimo metodus kaip ir cheminių reakcijų sistemoms.
Sąveikos tipų klasifikacija
Remiantis Volteros hipotezėmis, sąveikauja dvi rūšys, kurių skaičius x 1 ir x 2 galima apibūdinti lygtimis:
(9.1)
Čia parametrai a i - rūšių augimo greičio konstantos, c aš- populiacijos savaime ribojančios konstantos (intraspecifinė konkurencija), b ij– rūšių sąveikos konstantos, (i, j= 1,2). Šių koeficientų ženklai lemia sąveikos tipą.
Biologinėje literatūroje sąveikos paprastai klasifikuojamos pagal susijusius mechanizmus. Įvairovė čia didžiulė: įvairios trofinės sąveikos, cheminės sąveikos tarp bakterijų ir planktoninių dumblių, grybų sąveika su kitais organizmais, augalų organizmų eilės, ypač susijusios su konkurencija dėl saulės šviesos ir su dirvožemio evoliucija ir kt. Tokia klasifikacija atrodo nenusakoma.
E . Odumas, atsižvelgdamas į V. Volterros pasiūlytus modelius, pasiūlė klasifikaciją ne pagal mechanizmus, o pagal rezultatus. Pagal šią klasifikaciją ryšiai turėtų būti vertinami kaip teigiami, neigiami arba neutralūs, atsižvelgiant į tai, ar vienos rūšies gausa didėja, mažėja ar išlieka nepakitusi esant kitai rūšiai. Tada pagrindinius sąveikos tipus galima pateikti lentelės pavidalu.
RŪŠIŲ SĄVEIKOS TIPAI
|
SIMBIOZĖ |
b 12 ,b 21 >0 |
||
|
KOMENSALIZMAS |
b 12 ,>0, b 21 =0 |
||
|
PREDATOR-Grobis |
b 12 ,>0, b 21 <0 |
||
|
AMENZALIZMAS |
b 12 ,=0, b 21 <0 |
||
|
VARZYBOS |
b 12 , b 21 <0 |
||
|
NEUTRALIZMAS |
b 12 , b 21 =0 |
Paskutiniame stulpelyje rodomi sąveikos koeficientų ženklai iš sistemos (9.1)
Apsvarstykite pagrindinius sąveikos tipus
KONKURSŲ LYGTYBĖS:
Kaip matėme 6 paskaitoje, konkurencijos lygtys yra šios:
 (9.2)
(9.2)
Stacionarių sistemų sprendimai:
(1).
![]()
Bet kokių sistemos parametrų koordinačių pradžia yra nestabilus mazgas.
(2).
![]() (9.3)
(9.3)
C stacionari būsena (9.3) yra balnas ties a 1 >b 12 /iš 2 ir
stabilus mazgas ties a 1 12 /s 2 . Ši sąlyga reiškia, kad rūšis išnyksta, jei jos augimo tempas yra mažesnis už kokią nors kritinę vertę.
(3).
![]() (9.4)
(9.4)
C stacionarus tirpalas (9.4)¾ balno at a 2 >b 21 /c 1 ir stabilus mazgas ties a 2< b 21 /c 1
(4).
![]() (9.5)
(9.5)
Stacionari būsena (9.5) apibūdina dviejų konkuruojančių rūšių sambūvį ir yra stabilus mazgas, jei įvykdomas ryšys:
![]()
Tai reiškia nelygybę:
b 12
b 21
kuri leidžia suformuluoti rūšių sambūvio sąlygą:
Tarppopuliacijų sąveikos koeficientų sandauga yra mažesnė už populiacijos sąveikos koeficientų sandaugą.
Iš tiesų, tegul natūralūs šių dviejų rūšių augimo tempaia 1 , a 2 yra tas pats. Tada būtina stabilumo sąlyga
c 2 > b 12 ,c 1 >b 21 .
Šios nelygybės rodo, kad vieno iš konkurentų skaičiaus padidėjimas jo paties augimą slopina stipriau nei kito konkurento augimas. Jei abiejų rūšių gausą iš dalies arba visiškai riboja skirtingi ištekliai, aukščiau nurodytos nelygybės galioja. Jei abiejų rūšių poreikiai yra visiškai vienodi, tada viena iš jų bus gyvybingesnė ir išstums savo konkurentą.
Sistemos fazių trajektorijų elgsena vizualiai parodo galimus konkurencijos rezultatus. Dešiniąsias sistemos (9.2) lygčių puses prilyginame nuliui:
x 1 (a 1-c 1 x 1 – b 12 x 2) = 0 (dx 1 /dt = 0),
x 2 (a 2 –b 21 x 1 – c 2 x 2) = 0 (dx 2 /dt = 0),
Tokiu atveju gauname pagrindinių sistemos izoklinijų lygtis
x 2 = – b 21 x 1 / c 2 +a 2/c2, x 2 = 0
yra vertikalių liestinių izoklinijų lygtys.
x 2 = – c 1 x 1 /b12+ a 1 /b 12 , x 1 = 0
yra vertikalių liestinių izoklinijų lygtys. Vertikalios ir horizontalios liestinių sistemų izoklinijų porų susikirtimo taškai yra lygčių sistemos (9.2.) stacionarūs sprendiniai ir jų koordinatės. ![]() yra stacionarus konkuruojančių rūšių skaičius.
yra stacionarus konkuruojančių rūšių skaičius.
Galima pagrindinių izoklinų vieta sistemoje (9.2) parodyta 9.1 pav. Ryžiai. 9.1betatitinka rūšies išlikimąx 1, pav. 9.1 b- rūšies išlikimasx 2, pav. 9.1 in– rūšių sambūvis pagal sąlygas (9.6). 9.1 pavGdemonstruoja paleidimo sistemą. Čia konkurso rezultatas priklauso nuo pradinių sąlygų. Stacionari būsena (9.5), kuri abiem tipams nėra lygi nuliui, yra nestabili. Tai yra balnas, per kurį praeina separatorius, atskirdamas kiekvienos rūšies išlikimo sritis.

Ryžiai. 9.1.Pagrindinių izoklinų išsidėstymas dviejų tipų (9.2) skirtingų parametrų santykių Volterra konkurencijos sistemos faziniame portrete. Paaiškinimai tekste.
Norint ištirti rūšių konkurenciją, buvo atlikti eksperimentai su įvairiais organizmais. Paprastai atrenkamos dvi glaudžiai susijusios rūšys ir auginamos kartu bei atskirai griežtai kontroliuojamomis sąlygomis. Tam tikrais laiko tarpais atliekamas visiškas arba atrankinis gyventojų surašymas. Įrašykite kelių kartotinių eksperimentų duomenis ir analizuokite. Tyrimai buvo atlikti su pirmuoniais (ypač blakstienomis), daugeliu Tribolium, Drosophila genties vabalų rūšių ir gėlavandenių vėžiagyvių (dafnijų). Buvo atlikta daug eksperimentų su mikrobų populiacijomis (žr. 11 paskaitą). Eksperimentai taip pat buvo atliekami gamtoje, įskaitant planarijas (Reynolds), dvi skruzdėlių rūšis (Pontin) ir kt. 9.2. parodytos diatomų, naudojančių tą patį išteklius (užimančių tą pačią ekologinę nišą), augimo kreivės. Kai auginama monokultūroje Asterionella formosa pasiekia pastovų tankio lygį ir palaiko nuolat žemą ištekliaus (silikato) koncentraciją. B. Kai auginama monokultūroje Synedrauina elgiasi panašiai ir palaiko dar žemesnę silikato koncentraciją. B. Auginant kartu (dviem egzemplioriais) Synedrauina nukonkuruoja Asterionella formosa. Matyt, Synedra

Ryžiai. 9.2.Konkurencija diatomuose. bet - kai auginami monokultūroje Asterionella formosa pasiekia pastovų tankio lygį ir palaiko nuolat žemą ištekliaus (silikato) koncentraciją. b - kai auginami monokultūroje Synedrauina elgiasi panašiai ir palaiko dar žemesnę silikato koncentraciją. į - auginant kartu (dviem egzemplioriais) Synedruina nukonkuruoja Asterionella formosa. Matyt, Synedra konkursą laimi dėl gebėjimo visapusiškiau išnaudoti substratą (taip pat žr. 11 paskaitą).
Plačiai žinomi G. Gause konkurencijos tyrimo eksperimentai, parodantys vienos iš konkuruojančių rūšių išlikimą ir leidžiantys suformuluoti „konkurencinės atskirties dėsnį“. Įstatymas teigia, kad vienoje ekologinėje nišoje gali egzistuoti tik viena rūšis. Ant pav. 9.3. pateikiami Gause eksperimentų rezultatai dviem parametium rūšims, užimančioms tą pačią ekologinę nišą (9.3 pav. a, b) ir rūšims, užimančioms skirtingas ekologines nišas (9.3 pav. c).

Ryžiai. 9.3. bet- Dviejų rūšių populiacijos augimo kreivės Parametiumas vienos rūšies kultūrose. Juodi apskritimai - P Aurelija, balti apskritimai - P. Caudatum
b- P aurelijos ir P augimo kreivės. Caudatum mišrioje kultūroje.
Gausė, 1934 m
Konkurencijos modelis (9.2) turi trūkumų, visų pirma, iš to seka, kad dviejų rūšių sambūvis galimas tik tuo atveju, jei jų gausą riboja skirtingi veiksniai, tačiau modelis nenurodo, kokie dideli skirtumai turi būti, kad būtų užtikrintas ilgalaikis sambūvis. . Kartu žinoma, kad ilgalaikiam sambūviui besikeičiančioje aplinkoje reikalingas skirtumas, siekiantis tam tikrą vertę. Stochastinių elementų įvedimas į modelį (pavyzdžiui, išteklių naudojimo funkcijos įvedimas) leidžia kiekybiškai ištirti šiuos klausimus.
Predator + grobis sistema
 (9.7)
(9.7)
Čia, priešingai nei (9.2), ženklai b 12 Ir b 21 - kitoks. Kaip ir konkurencijos atveju, kilmė
![]() (9.8)
(9.8)
yra vienaskaita nestabilaus mazgo tipo taškas. Trys kitos galimos stacionarios būsenos:
![]() ,(9.9)
,(9.9)
![]() (9.10)
(9.10)
![]() (9.11)
(9.11)
Taigi išgyventi gali tik grobis (9.10), galimas tik plėšrūnas (9.9) (jei turi kitų maisto šaltinių) ir abiejų rūšių sambūvis (9.11). Pastarąjį variantą mes jau svarstėme 5 paskaitoje. Galimi plėšrūno-grobio sistemos fazinių portretų tipai parodyti pav. 9.4.
Horizontaliųjų liestinių izoklinijos yra tiesios
x 2 = – b 21 X 1 /c 2 + a 1/c2, X 2 = 0,
ir vertikaliųjų liestinių izoklinas– tiesus
x 2 = - c 1 X 1 /b 12 + a 2 /b 12 , X 1 = 0.
Stacionarieji taškai yra vertikalių ir horizontalių liestinių izoklinijų sankirtoje.

Iš pav. 9.4 matosi taip. plėšrūno-grobio sistema (9.7) gali turėti stabilią pusiausvyros padėtį, kurioje o romo aukų populiacija visiškai išnyko ( ) ir liko tik plėšrūnai (taškas 2 pav. 9.4 bet). Akivaizdu, kad tokia situacija gali būti realizuota tik tuo atveju, jei, be nagrinėjamų aukų tipo, X 1 plėšrūnas X 2 - turi papildomų maitinimo šaltinių. Šį faktą modelyje atspindi teigiamas žodis, esantis x 2 lygties dešinėje. Vienetiniai taškai(1) ir (3) (9.4 pav.). bet) yra nestabilūs. Antra galimybė – stabili stacionari būsena, kurioje plėšrūnų populiacija visiškai išmirė ir liko tik aukos – stabilus taškas(3) (9.4 pav 6 ). Čia yra ypatingas taškas (1) – taip pat nestabilus mazgas.
Galiausiai trečia galimybė – stabilus plėšrūnų ir grobio populiacijų sambūvis (1 pav.). 9.4 in), kurių stacionarios gausos išreiškiamos formulėmis (9.11).
Kaip ir vienos populiacijos atveju (žr. 3 paskaitą), modeliui (9.7) galima sukurti stochastinį modelį, bet jo negalima aiškiai išspręsti. Todėl apsiribojame bendrais svarstymais. Tarkime, kad, pavyzdžiui, pusiausvyros taškas yra tam tikru atstumu nuo kiekvienos ašies. Tada fazių trajektorijoms, kuriose reikšmėsx 1 , x 2 išliks pakankamai didelis, deterministinis modelis bus gana patenkinamas. Bet jei tam tikru fazės trajektorijos tašku koks nors kintamasis nėra labai didelis, atsitiktiniai svyravimai gali tapti reikšmingi. Jie lemia tai, kad reprezentacinis taškas persikels į vieną iš ašių, o tai reiškia atitinkamos rūšies išnykimą.
Taigi stochastinis modelis pasirodo nestabilus, nes stochastinis „dreifas“ anksčiau ar vėliau veda prie vienos rūšies išnykimo. Taikant tokį modelį, plėšrūnas galiausiai išnyksta atsitiktinai arba dėl to, kad pirmiausia pašalinama jo grobio populiacija. Stochastinis plėšrūno ir grobio sistemos modelis gerai paaiškina Gauso eksperimentus (Gause, 1934), kuriame blakstienas Paramettum candatum tarnavo kaip grobis kitam blakstienai Didinium nasatum – plėšrūnas. Tikimasi pagal deterministines lygtis (9.7) pusiausvyros skaičiai šiuose eksperimentuose buvo maždaug tik penki kiekvienos rūšies individai, todėl nieko stebėtino, kad kiekviename kartotiniame eksperimente arba plėšrūnai, arba grobis (o vėliau ir plėšrūnai) gana greitai išmirė. Pateikiami eksperimentų rezultatai. pav. 9.5.

Ryžiai. 9.5. Augimas Parametium caudatum ir plėšriųjų blakstienų Dadinium nasutum. Iš : Gause G.F. Kova už būvį. Baltimorė, 1934
Taigi, Volterra rūšių sąveikos modelių analizė rodo, kad nepaisant didelės tokių sistemų elgsenos tipų įvairovės, konkuruojančių rūšių modelyje išvis negali būti neslopinamų populiacijos svyravimų. Tačiau tokie svyravimai pastebimi gamtoje ir eksperimentuose. Jų teorinio paaiškinimo poreikis buvo viena iš priežasčių, kodėl modelių aprašymai buvo suformuluoti bendresne forma.
Apibendrinti dviejų tipų sąveikos modeliai
Buvo pasiūlyta daug modelių, apibūdinančių rūšių sąveiką, kurių lygčių dešinės pusės buvo sąveikaujančių populiacijų dydžių funkcijos. Buvo svarstomas bendrųjų kriterijų kūrimo klausimas, siekiant nustatyti, kokios funkcijos gali apibūdinti laikino populiacijos dydžio elgesį, įskaitant stabilius svyravimus. Žinomiausi iš šių modelių yra Kolmogorovo (1935 m., peržiūrėta 1972 m.) ir Rosenzweigo (1963 m.).
 (9.12)
(9.12)
Modelis pagrįstas šiomis prielaidomis:
1) Plėšrūnai tarpusavyje nebendrauja, t.y. plėšrūnų veisimosi greitis k 2 ir aukų skaičius L, kurį per laiko vienetą išnaikina vienas plėšrūnas, nepriklauso nuo y.
2) Grobio skaičiaus padidėjimas esant plėšrūnams yra lygus padidėjimui, kai plėšrūnų nėra, atėmus plėšrūnų išnaikinto grobio skaičių. Funkcijos k 1 (x), k 2 (x), L(x), yra ištisiniai ir apibrėžti teigiamoje pusašėje x, y³ 0.
3) dk 1 /dx< 0. Tai reiškia, kad grobio dauginimo koeficientas nesant plėšrūno monotoniškai mažėja didėjant grobio skaičiui, o tai atspindi ribotus maisto ir kitus išteklius.
4) dk 2 /dx> 0, k 2 (0) < 0 < k 2 (¥ ). Didėjant grobio skaičiui, plėšrūnų dauginimo koeficientas monotoniškai mažėja didėjant grobio skaičiui, pereinant nuo neigiamų verčių (kai nėra ko valgyti) prie teigiamų.
5) Vieno plėšrūno per laiko vienetą išnaikintų aukų skaičius L(x)> 0 adresu N> 0; L(0)=0.
Sistemos (9.12) fazinių portretų galimi tipai parodyti pav. 9.6:

Ryžiai. 9.6.Kolmogorovo sistemos faziniai portretai (9.12), apibūdinantys dviejų tipų sąveiką esant skirtingiems parametrų santykiams. Paaiškinimai tekste.
Stacionarūs sprendimai (jų yra du ar trys) turi šias koordinates:
(1). ` x=0;` y=0.
Bet kurių parametrų reikšmių koordinačių pradžia yra balnas (9.6 pav. a-d).
(2). ` x=A,` y=0.(9.13)
Anustatoma iš lygties:
k 1 (A)=0.
Stacionarus sprendimas (9.13) yra balnas, jei B< A (9.6 pav bet, b, G), B nustatoma iš lygties
k 2 (B)=0
Taškas (9.13) dedamas į teigiamą kvadrantą, jei B>A . Tai stabilus mazgas .
Paskutinis atvejis, atitinkantis plėšrūno mirtį ir grobio išgyvenimą, parodytas Fig. 9.6 in.
(3). ` x = B,` y=C.(9.14)
C reikšmė nustatoma pagal lygtis:
Taškas (9.14) – židinys (9.6 pav.). bet) arba mazgas (9.6 pav G), kurio stabilumas priklauso nuo kiekio ženklos
s 2 = – k 1 (B)-k 1 (B)B+L(B)C.
Jeigu s>0, taškas yra stabilus, jeis<0 ‑ точка неустойчива, и вокруг нее могут существовать предельные циклы (рис. 9.6 b)
Užsienio literatūroje dažniau svarstomas panašus Rosenzweig ir MacArthur (1963) pasiūlytas modelis:
 (9.15)
(9.15)
kur f(x) – aukų skaičiaus kitimo tempas x nesant plėšrūnų, F( x,y) yra grobuonystės intensyvumas, k- koeficientas, apibūdinantis grobio biomasės pavertimo plėšrūnų biomase efektyvumą, e- Plėšrūnų mirtingumas.
Modelis (9.15) redukuojasi iki konkretaus Kolmogorovo modelio (9.12) atvejo pagal šias prielaidas:
1) plėšrūnų skaičių riboja tik grobio skaičius,
2) greitis, kuriuo konkretus plėšrūno individas suėda grobį, priklauso tik nuo grobio populiacijos tankio ir nepriklauso nuo plėšrūnų populiacijos tankio.
Tada lygtys (9.15) įgauna formą.

Apibūdinant realių rūšių sąveiką, teisingos lygčių dalys konkretizuojamos pagal idėjas apie biologines realijas. Apsvarstykite vieną iš populiariausių šio tipo modelių.
Dviejų rūšių vabzdžių sąveikos modelis (MacArthur, 1971)
Modelis, kurį aptarsime toliau, buvo naudojamas sprendžiant praktinę kenkėjų kontrolės problemą sterilizuojant vienos rūšies patinus. Remiantis biologinėmis rūšių sąveikos ypatybėmis, buvo parašytas toks modelis
 (9.16)
(9.16)
čia x,y- dviejų rūšių vabzdžių biomasė. Šiame modelyje aprašytų rūšių trofinė sąveika yra labai sudėtinga. Tai lemia dešiniosiose lygčių pusėse esančių polinomų formą.
Apsvarstykite pirmosios lygties dešinę pusę. Vabzdžių rūšys X valgo rūšies lervas adresu(narys + k 3 y), bet rūšies suaugusieji adresu valgo rūšies lervas X priklauso daugybei rūšių X arba adresu arba abiejų rūšių (nariai –k 4 xy, – y 2). Prie mažų X rūšių mirtingumas X didesnis nei natūralus jo prieaugis (1 –k 1 +k 2 x–x 2 < 0 prie mažų X). Antroje lygtyje terminas k 5 atspindi natūralų rūšies augimą y; –k 6 y- tokio pobūdžio susivaldymas,–k 7 x- mintančios rūšies lervos adresu rūšies vabzdžiai x, k 8 xy – rūšių biomasės augimas adresu suėsdami suaugę šios rūšies vabzdžiai adresu rūšies lervos X.
Ant pav. 9.7 pateikiamas ribinis ciklas, kuris yra stabilaus periodinio sistemos sprendimo trajektorija (9.16).
Išspręsti klausimą, kaip užtikrinti populiacijos sugyvenimą su jos biologine aplinka, žinoma, negalima gauti neatsižvelgus į konkrečios biologinės sistemos specifiką ir visų jos tarpusavio ryšių analizę. Kartu formalių matematinių modelių tyrimas leidžia atsakyti į kai kuriuos bendruosius klausimus. Galima teigti, kad (9.12) tipo modeliams populiacijų suderinamumo ar nesuderinamumo faktas nepriklauso nuo pradinio jų dydžio, o yra nulemtas tik rūšių sąveikos pobūdžio. Modelis padeda atsakyti į klausimą: kaip paveikti biocenozę, ją valdyti, kad kenksmingos rūšys būtų kuo greičiau sunaikintos.
Valdymas gali būti sumažintas iki trumpalaikio, spazminio populiacijos dydžio pasikeitimo X Ir y.Šis metodas atitinka kontrolės metodus, tokius kaip vienos ar abiejų populiacijų sunaikinimas cheminėmis priemonėmis. Iš aukščiau suformuluoto teiginio matyti, kad suderinamoms populiacijoms šis valdymo būdas bus neveiksmingas, nes laikui bėgant sistema vėl pasieks stacionarų režimą.
Kitas būdas yra pakeisti sąveikos funkcijų tipą tarp tipų, pavyzdžiui, keičiant sistemos parametrų reikšmes. Būtent šį parametrinį metodą atitinka biologiniai kovos metodai. Taigi, įvedant sterilizuotus patinus, natūralaus populiacijos prieaugio koeficientas mažėja. Jei tuo pačiu metu gausime kito tipo fazinį portretą, kuriame yra tik stabili stacionari būsena su nuliu kenkėjų skaičiumi, kontrolė leis pasiekti norimą rezultatą. – kenkėjų populiacijos sunaikinimas. Įdomu pastebėti, kad kartais patartina poveikį taikyti ne pačiam kenkėjui, o jo partneriui. Kuris iš metodų efektyvesnis, apskritai pasakyti neįmanoma. Tai priklauso nuo turimų valdymo priemonių ir nuo aiškios funkcijų, apibūdinančių populiacijų sąveiką, formos.
Modelis A.D.Bazykinas
Išsamiausiai rūšių sąveikos modelių teorinė analizė atlikta A. D. Bazykino knygoje „Sąveikaujančių populiacijų biofizika“ (M., Nauka, 1985).
Apsvarstykite vieną iš šioje knygoje tyrinėtų plėšrūnų ir grobio modelių.
 (9.17)
(9.17)
Sistema (9.17) – tai paprasčiausio Volteros plėšrūno-grobio modelio (5.17) apibendrinimas, atsižvelgiant į plėšrūnų prisotinimo efektą. Modelyje (5.17) daroma prielaida, kad grobio ganymosi intensyvumas didėja tiesiškai didėjant grobio tankiui, o tai neatitinka tikrovės esant dideliam grobio tankiui. Plėšrūnų mitybos priklausomybei nuo grobio tankio apibūdinti galima pasirinkti įvairias funkcijas. Svarbiausia, kad pasirinkta funkcija didėja x asimptotiškai linksta į pastovią vertę. Modelis (9.6) naudojo logistinę priklausomybę. Bazykin modelyje kaip tokia funkcija pasirenkama hiperbolė x/(1+px). Prisiminkite, kad Monod formulė, kuri apibūdina mikroorganizmų augimo greičio priklausomybę nuo substrato koncentracijos, turi tokią formą. Čia grobis veikia kaip substratas, o plėšrūnas – kaip mikroorganizmai. .
Sistema (9.17) priklauso nuo septynių parametrų. Parametrų skaičių galima sumažinti keičiant kintamuosius:
x® (REKLAMA)x; y ® (REKLAMA)/y;
t® (1/A)t; g (9,18)
ir priklauso nuo keturių parametrų.
Norint atlikti pilną kokybinį tyrimą, būtina keturių dimensijų parametrų erdvę suskirstyti į regionus su skirtingo tipo dinamine elgsena, t.y. sukurti parametrinį arba struktūrinį sistemos portretą.
Tada reikia sukurti fazinius portretus kiekvienam parametrinio portreto regionui ir aprašyti bifurkacijas, atsirandančias su faziniais portretais skirtingų parametrinio portreto sričių ribose.
Viso parametrinio portreto konstrukcija sudaroma kaip mažo matmens parametrinio portreto „pjūvių“ (projekcijų) rinkinys su fiksuotomis kai kurių parametrų reikšmėmis.
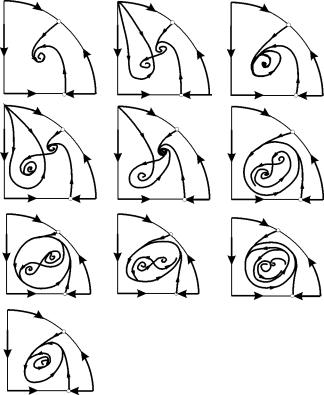
Parametrinis sistemos portretas (9.18) fiksuotam g ir mažas e parodyta 9.8 pav. Portrete yra 10 sričių su skirtingais fazės trajektorijos elgesio tipais.

Ryžiai. 9.8.Parametrinis sistemos portretas (9.18) fiksuotamg
ir mažas e
Sistemos elgsena su skirtingais parametrų santykiais gali labai skirtis (9.9 pav.). Sistemoje galimi šie dalykai:
1) viena stabili pusiausvyra (1 ir 5 regionai);
2) vienas stabilus ribinis ciklas (3 ir 8 regionai);
3) dvi stabilios pusiausvyros (2 regionas)
4) stabilus ribinis ciklas ir nestabili pusiausvyra jame (6, 7, 9, 10 regionai)
5) stabilus ribinis ciklas ir stabili pusiausvyra už jo ribų (4 sritis).
7, 9, 10 parametrinėse srityse pusiausvyros traukos sritį riboja nestabilus ribinis ciklas, esantis stabilios zonos viduje. Įdomiausias yra fazinis portretas, atitinkantis 6 sritį parametriniame portrete. Tai išsamiai parodyta fig. 9.10.
Pusiausvyros B 2 traukos sritis (tamsuota) yra „sraigė“, besisukanti iš nestabilaus židinio B 1 . Jei žinoma, kad pradiniu laiko momentu sistema buvo šalia B 1, tada galima spręsti, ar atitinkama trajektorija pasieks pusiausvyrą B 2, ar į stabilų ribinį ciklą, supantį tris pusiausvyros taškus C ( balnas), B 1 ir B 2 tik remiantis tikimybiniais sumetimais.
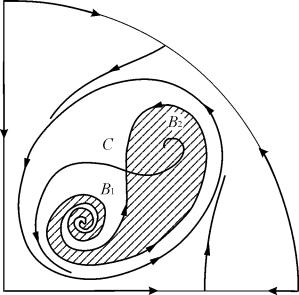
9.10 pav.9.18 sistemos fazinis portretas, skirtas 6 parametrinei sričiai. Pritraukimo sritis B 2 užtamsinta
Ant parametrinio portreto(9.7) yra 22 susidarančios įvairios bifurkacijos ribos 7 įvairių tipų bifurkacijos. Jų tyrimas leidžia nustatyti galimus sistemos elgesio tipus, kai keičiasi jos parametrai. Pavyzdžiui, persikėlus iš teritorijos 1 į 3 sritį gimsta mažas ribinis ciklas arba švelniai gimsta savaiminiai svyravimai aplink vieną pusiausvyrą IN. Panašus minkštas savaiminių virpesių gimimas, bet aplink vieną iš pusiausvyros, būtent B 1 , atsiranda kertant regionų sieną 2 ir 4. Judant iš teritorijos 4 iki 5 srities stabilus ribinis ciklas aplink taškąB 1 „sprogsta“ separatrikso kilpoje ir vienintelis traukiantis taškas yra pusiausvyra B 2 ir tt
Be abejo, ypač įdomu praktikai sistemos artumo prie bifurkacijos ribos kriterijų kūrimas. Iš tiesų, biologai puikiai žino natūralių ekologinių sistemų „buferinę“ arba „lankstumo“ savybę. Šie terminai paprastai reiškia sistemos gebėjimą sugerti išorinį poveikį. Kol išorinio poveikio intensyvumas neviršija tam tikros kritinės reikšmės, sistemos elgsena nevyksta kokybinių pokyčių. Fazinėje plokštumoje tai atitinka sistemos grįžimą į stabilią pusiausvyros būseną arba į stabilų ribinį ciklą, kurio parametrai nedaug skiriasi nuo pradinio. Kai smūgio intensyvumas viršija leistiną, sistema „suyra“, pereina į kokybiškai skirtingą dinaminio elgesio režimą, pavyzdžiui, tiesiog užgęsta. Šis reiškinys atitinka bifurkacijos perėjimą.
Kiekvienas bifurkacinių perėjimų tipas turi savo išskirtinių bruožų, leidžiančių spręsti apie tokio perėjimo pavojų ekosistemai. Štai keletas bendrų kriterijų, liudijančių apie pavojingos ribos artumą. Kaip ir vienos rūšies atveju, jei sumažėjus vienos rūšies skaičiui sistema „užstringa“ šalia nestabilaus balno taško, o tai išreiškiama labai lėtu skaičiaus atkūrimu iki pradinės vertės, tada sistema yra netoli kritinės ribos. Plėšrūnų ir grobio skaičiaus svyravimų formos pokyčiai taip pat yra pavojaus rodiklis. Jei svyravimai tampa relaksaciniais iš artimų harmoninių, o svyravimų amplitudė didėja, tai gali lemti sistemos stabilumo praradimą ir vienos rūšies išnykimą.
Toliau gilinant matematinę rūšių sąveikos teoriją, detalizuojama pačių populiacijų struktūra ir atsižvelgiama į laiko ir erdvės veiksnius.
Literatūra.
Kolmogorovas A.N. Kokybinis populiacijos dinamikos matematinių modelių tyrimas. // Kibernetikos problemos. M., 1972, 5 leidimas.
MacArtur R. Grafinė ekologinių sistemų analizė// Biologijos ataskaitos skyrius Perinceton University. 1971
AD Bazykin „Sąveikaujančių populiacijų biofizika“. M., Nauka, 1985 m.
W. Volterra: „Matematinė kovos už būvį teorija“. M.. Mokslas, 1976 m
Marlė G.F. Kova už būvį. Baltimorė, 1934 m.
Dažnai vienos rūšies (populiacijos) atstovai minta kitos rūšies atstovais.
Lotka-Volterra modelis yra dviejų „plėšrūno-grobio“ tipo populiacijų tarpusavio egzistavimo modelis.
„Plėšrūno-grobio“ modelį pirmą kartą 1925 metais gavo A. Lotka, juo apibūdindamas sąveikaujančių biologinių populiacijų dinamiką. 1926 m., nepriklausomai nuo Lotkos, panašius (be to, sudėtingesnius) modelius sukūrė italų matematikas V. Volterra, kurio gilūs tyrinėjimai aplinkos problemų srityje padėjo pamatus matematinei biologinių bendrijų teorijai, arba vadinamajai. . matematinė ekologija.
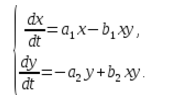
Matematine forma siūloma lygčių sistema yra tokia:
čia x – grobio skaičius, y – plėšrūnų skaičius, t – laikas, α, β, γ, δ – koeficientai, atspindintys populiacijų sąveiką.
Problemos formulavimas
Apsvarstykite uždarą erdvę, kurioje yra dvi populiacijos - žolėdžiai ("aukos") ir plėšrūnai. Manoma, kad gyvūnai nėra įvežami ir neeksportuojami, o žolėdžiams maisto užtenka. Tada aukų skaičiaus keitimo lygtis (tik aukų) bus tokia:
kur $α$ yra aukų gimstamumas,
$x$ yra grobio populiacijos dydis,
$\frac(dx)(dt)$ yra grobio populiacijos augimo tempas.
Kai plėšrūnai nemedžioja, jie gali išnykti, todėl plėšrūnų (tik plėšrūnų) skaičiaus lygtis tampa tokia:
Kur $γ$ yra plėšrūnų išnykimo koeficientas,
$y$ yra plėšrūnų populiacijos dydis,
$\frac(dy)(dt)$ yra plėšrūnų populiacijos augimo tempas.
Kai plėšrūnai ir grobis susitinka (susitikimų dažnis yra tiesiogiai proporcingas produktui), plėšrūnai grobį naikina koeficientu, gerai maitinami plėšrūnai gali atgaminti palikuonis su koeficientu. Taigi modelio lygčių sistema bus tokia:
Problemos sprendimas
Sukurkime matematinį dviejų „plėšrūno-grobio“ tipo biologinių populiacijų sambūvio modelį.
Tegul dvi biologinės populiacijos gyvena kartu izoliuotoje aplinkoje. Aplinka yra stacionari ir vienai iš rūšių – aukai – suteikia neribotą kiekį visko, ko reikia gyvybei. Kita rūšis – plėšrūnas – taip pat gyvena nejudančiomis sąlygomis, tačiau minta tik grobiu. Katės, vilkai, lydekos, lapės gali būti plėšrūnai, o vištos, kiškiai, karosai, pelės – atitinkamai.
Tikslumo dėlei laikykime kates plėšrūnais, o vištas – aukomis.
Taigi, vištos ir katės gyvena kažkokioje izoliuotoje erdvėje – namų kieme. Aplinka viščiukams suteikia neribotą maistą, o katės valgo tik vištas. Pažymėti
$x$ - viščiukų skaičius,
$y$ yra kačių skaičius.
Laikui bėgant viščiukų ir kačių skaičius kinta, tačiau $x$ ir $y$ laikysime nuolatinėmis laiko t funkcijomis. Skaičių porą $x, y)$ pavadinkime modelio būsena.
Raskime, kaip keičiasi modelio $(x, y).$ būsena
Apsvarstykite $\frac(dx)(dt)$, viščiukų skaičiaus kitimo greitį.
Jei kačių nėra, tada viščiukų daugėja ir kuo greičiau, tuo daugiau viščiukų. Priklausomybę laikysime tiesine:
$\frac(dx)(dt) a_1 x$,
$a_1$ – koeficientas, priklausantis tik nuo viščiukų gyvenimo sąlygų, natūralaus mirtingumo ir gimstamumo.
$\frac(dy)(dt)$ – kačių skaičiaus kitimo greitis (jei nėra viščiukų), priklauso nuo kačių skaičiaus y.
Jei viščiukų nėra, tai kačių mažėja (neturi maisto) ir jos išmiršta. Priklausomybę laikysime tiesine:
$\frac(dy)(dt) - a_2 y$.
Ekosistemoje kiekvienos rūšies skaičiaus kitimo greitis taip pat bus laikomas proporcingu jos skaičiui, tačiau tik su koeficientu, priklausančiu nuo kitos rūšies individų skaičiaus. Taigi viščiukams šis koeficientas mažėja didėjant kačių skaičiui, o katėms – didėja didėjant viščiukų skaičiui. Darysime prielaidą, kad priklausomybė taip pat yra tiesinė. Tada gauname diferencialinių lygčių sistemą:
Ši lygčių sistema vadinama Volteros-Lotkos modeliu.
a1, a2, b1, b2 yra skaitiniai koeficientai, vadinami modelio parametrais.
Kaip matote, modelio būsenos pasikeitimo pobūdį (x, y) lemia parametrų reikšmės. Keičiant šiuos parametrus ir sprendžiant modelio lygčių sistemą, galima tirti ekologinės sistemos būklės kitimo dėsningumus.
Naudojant MATLAB programą, Lotkos-Volteros lygčių sistema išsprendžiama taip:
Ant pav. 1 parodytas sistemos sprendimas. Priklausomai nuo pradinių sąlygų, sprendimai yra skirtingi, o tai atitinka skirtingas trajektorijų spalvas.
Ant pav. 2 pavaizduoti tie patys sprendiniai, bet atsižvelgiant į laiko ašį t (t.y. yra priklausomybė nuo laiko).
Biologinių procesų matematinis modeliavimas prasidėjo sukūrus pirmuosius paprastus ekologinės sistemos modelius.
Tarkime, kokioje nors uždaroje teritorijoje gyvena lūšys ir kiškiai. Lūšys minta tik kiškiais, o kiškiai – augaliniu maistu, kurio galima įsigyti neribotais kiekiais. Būtina rasti makroskopines charakteristikas, apibūdinančias populiacijas. Tokios charakteristikos yra individų skaičius populiacijose.
Paprasčiausias plėšrūnų ir grobio populiacijų santykių modelis, pagrįstas logistine augimo lygtimi, pavadintas (taip pat ir tarprūšinės konkurencijos modelis) jo kūrėjų Lotkos ir Volteros vardu. Šis modelis labai supaprastina tiriamą situaciją, tačiau vis tiek yra naudingas kaip atspirties taškas plėšrūnų ir grobio sistemos analizei.
Tarkime, kad (1) grobio populiacija egzistuoja idealioje (nuo tankio nepriklausomoje) aplinkoje, kur jos augimą gali riboti tik plėšrūno buvimas, (2) tokia pat ideali aplinka, kurioje yra plėšrūnas, kurio populiacijos augimas yra ribotas. tik dėl grobio gausos, (3) abi populiacijos nuolat dauginasi pagal eksponentinį augimo lygtį, (4) plėšrūnų, valgančių grobį, dažnis yra proporcingas jų susitikimų dažniui, o tai savo ruožtu priklauso nuo populiacijos. tankis. Šios prielaidos yra Lotka-Volterra modelio pagrindas.
Tegul grobio populiacija auga eksponentiškai, jei nėra plėšrūnų:
dN/dt =r 1 N 1
kur N yra skaičius, o r yra specifinis momentinis grobio populiacijos augimo tempas. Jei yra plėšrūnų, jie naikina grobį tokiu greičiu, kurį lemia, pirma, plėšrūnų ir grobio susitikimų dažnis, kuris didėja didėjant jų skaičiui, ir, antra, efektyvumas, kuriuo plėšrūnas aptinka ir sugauna grobį. susitikus. Vieno plėšrūno sutiktų ir suėstų aukų skaičius N c proporcingas medžioklės efektyvumui, kurį išreikšime koeficientu C 1; aukos N skaičius (tankis) ir paieškai praleistas laikas T:
N C \u003d C 1 NT(1)
Iš šios išraiškos nesunku nustatyti specifinį plėšrūno suvartoto grobio normą (ty vieno plėšrūno individo suvalgyto grobio skaičių per laiko vienetą), kuris dažnai dar vadinamas funkciniu plėšrūno atsaku grobio populiacijos tankis:
Nagrinėjamame modelyje Nuo 1 yra konstanta. Tai reiškia, kad grobio, kurį plėšrūnai paima iš populiacijos, skaičius didėja tiesiškai didėjant jos tankiui (vadinamoji 1 tipo funkcinė reakcija). Akivaizdu, kad bendras visų plėšrūnų individų grobio suvartojimo lygis bus:
![]() (3)
(3)
kur R - plėšrūnų populiacija. Dabar grobio populiacijos augimo lygtį galime parašyti taip:
Nesant grobio, plėšrūnų individai badauja ir miršta. Taip pat darykime prielaidą, kad šiuo atveju plėšrūnų populiacija sumažės eksponentiškai pagal lygtį:
![]() (5)
(5)
kur r2- specifinis momentinis plėšrūnų populiacijos mirtingumas.
Jei yra aukų, tada daugės tie plėšrūno individai, kurie gali jas rasti ir suėsti. Šiame modelyje plėšrūnų populiacijos gimstamumas priklauso tik nuo dviejų aplinkybių: plėšrūno suvartoto grobio greičio ir efektyvumo, kuriuo plėšrūnas suvartotą maistą perdirba į palikuonis. Jei šį efektyvumą išreikšime koeficientu s, gimstamumas bus toks:
![]()
Kadangi C 1 ir s yra konstantos, jų sandauga taip pat yra konstanta, kurią žymėsime kaip C 2 . Tada plėšrūnų populiacijos augimo tempą lems gimimų ir mirčių balansas pagal lygtį:
![]() (6)
(6)
4 ir 6 lygtys kartu sudaro Lotka-Volterra modelį.
Šio modelio savybes galime tyrinėti lygiai taip pat, kaip ir konkurencijos atveju, t.y. sukonstruojant fazių diagramą, kurioje grobio skaičius brėžiamas išilgai ordinačių ašies, o plėšrūno – išilgai abscisių ašies ir nubrėžiant ant jos izoklinijas-linijas, atitinkančias pastovų populiacijų skaičių. Tokių izoklinų pagalba nustatoma sąveikaujančių plėšrūnų ir grobio populiacijų elgsena.
Grobio populiacijai: iš kur
Taigi, kadangi r ir C 1 yra konstantos, grobio izoklina bus ta linija, kurioje plėšrūno skaičius (R) yra pastovus, t.y. lygiagreti x ašiai ir kertanti y ašį taške P \u003d r 1 / Nuo 1. Virš šios linijos grobio skaičius mažės, o žemiau – didės.
Plėšrūnų populiacijai:
iš kur
Tiek, kiek r2 ir C 2 – konstantos, izoklina plėšrūnui bus ta linija, kurioje grobio skaičius (N) yra pastovus, t.y. statmena ordinačių ašiai ir kertanti abscisių ašį taške N = r 2 /C 2. Į kairę nuo jo plėšrūnų skaičius sumažės, o į dešinę - padidės.
Jei apsvarstysime šias dvi izoklinas kartu, galime lengvai pastebėti, kad plėšrūnų ir grobio populiacijų sąveika yra cikliška, nes jų skaičius neribotai svyruoja. Kai grobio skaičius yra didelis, plėšrūnų daugėja, o tai padidina plėšrūnų spaudimą grobio populiacijai ir dėl to mažėja jų skaičius. Dėl šio sumažėjimo, savo ruožtu, plėšrūnams trūksta maisto ir sumažėja jų skaičius, o tai lemia plėšrūnų spaudimo susilpnėjimą ir grobio skaičiaus padidėjimą, o tai vėl lemia grobio populiacijos padidėjimą, ir tt
Šiam modeliui būdingas vadinamasis „neutralus stabilumas“, o tai reiškia, kad populiacijos neribotą laiką atlieka tą patį svyravimų ciklą, kol koks nors išorinis poveikis nepakeičia jų skaičių, o po to populiacijos atlieka naują svyravimų ciklą su skirtingais parametrais. Kad ciklai taptų stabilūs, populiacijos turi, po išorinių poveikių, stengtis grįžti į pradinį ciklą. Tokie ciklai, priešingai nei neutraliai stabilūs svyravimai Lotka-Volterra modelyje, vadinami stabilūs ribiniai ciklai.
Tačiau Lotka-Volterra modelis yra naudingas tuo, kad leidžia parodyti pagrindinę plėšrūno ir grobio santykių tendenciją – ciklinių konjuguotų jų populiacijų skaičiaus svyravimų atsiradimą.
Dar 20-aisiais. A. Lotka, o kiek vėliau, nepriklausomai nuo jo, W. Voltaire'as pasiūlė matematinius modelius, apibūdinančius konjuguotus plėšrūno ir grobio skaičiaus svyravimus.
Modelis susideda iš dviejų komponentų:
C – plėšrūnų skaičius; N – aukų skaičius;
Tarkime, nesant plėšrūnų, grobio populiacija augs eksponentiškai: dN/dt = rN. Tačiau grobį plėšrūnai naikina tokiu greičiu, kurį nulemia plėšrūnų ir grobio susitikimų dažnis, o susidūrimų dažnis didėja didėjant plėšrūnų (C) ir grobio (N) skaičiui. Tikslus sutikto ir sėkmingai suvalgyto grobio skaičius priklausys nuo to, kokiu efektyvumu plėšrūnas suranda ir pagauna grobį, t.y. iš a' – „paieškos efektyvumas“ arba „atakų dažnis“. Taigi „sėkmingų“ plėšrūno ir grobio susitikimų dažnis ir atitinkamai grobio suvartojimo greitis bus lygus a’CN ir apskritai: dN/dt = rN – a’CN (1*).
Trūkstant maisto, atskiri plėšrūno individai numeta svorio, badauja ir miršta. Tarkime, kad nagrinėjamame modelyje plėšrūnų populiacijos dydis nesant maisto dėl bado sumažės eksponentiškai: dC/dt = - qC, kur q – mirtingumas. Mirtis kompensuojama naujų asmenų gimimu tokiu greičiu, kuris, kaip manoma šiame modelyje, priklauso nuo dviejų aplinkybių:
1) maisto suvartojimo norma, a'CN;
2) efektyvumas (f), kuriuo šis maistas patenka į plėšrūno palikuonis.
Taigi plėšrūno gimstamumas lygus fa’CN ir apskritai: dC/dt = fa’CN – qC (2*). 1* ir 2* lygtys sudaro Lotka-Voltaire modelį. Galima ištirti šio modelio savybes, sudaryti linijines izoklinas, atitinkančias pastovų populiacijos dydį, tokių izoklinų pagalba nustatoma sąveikaujančių plėšrūnų ir grobio populiacijų elgsena.
Grobio populiacijos atveju: dN/dt = 0, rN = a'CN arba C = r/a'. Nes r ir a' = const, aukos izoklinija bus ta linija, kuriai C reikšmė yra pastovi:
Esant mažam plėšrūnų tankiui (C), grobio (N) skaičius didėja, priešingai – mažėja.
Panašiai ir plėšrūnams (2 lygtis*), kurių dC/dt = 0, fa’CN = qC arba N = q/fa’, t.y. plėšrūno izoklina bus linija, išilgai kurios N yra pastovus: Esant dideliam grobio tankiui, plėšrūnų populiacija didėja, o esant mažam – mažėja.
Jų skaičius neribotai svyruoja. Kai grobio skaičius yra didelis, plėšrūnų skaičius didėja, o tai padidina plėšrūnų spaudimą grobio populiacijai ir dėl to mažėja jų skaičius. Dėl šio sumažėjimo savo ruožtu ribojamas plėšrūnų kiekis maiste ir sumažėja jų skaičius, dėl to susilpnėja plėšrūnų spaudimas ir didėja grobio skaičius, o tai vėl lemia plėšrūnų populiacijos padidėjimą. ir kt.
Populiacijos atlieka tą patį svyravimų ciklą neribotą laiką, kol koks nors išorinis poveikis nepakeičia jų skaičių, o po to populiacijos atlieka naujus neribotų svyravimų ciklus. Tiesą sakant, aplinka nuolat keičiasi, o populiacijų skaičius nuolat pereis į naują lygį. Kad populiacijos svyravimų ciklai būtų reguliarūs, jie turi būti stabilūs: jei išorinė įtaka keičia populiacijų lygį, tada jos turi krypti į pradinį ciklą. Tokie ciklai vadinami stabiliais, ribiniais ciklais.
Lotkos-Voltaire modelis leidžia parodyti pagrindinę plėšrūno ir grobio santykio tendenciją, kuri išreiškiama grobio populiacijos gausos svyravimais, kuriuos lydi plėšrūnų populiacijos gausos svyravimai. Pagrindinis tokių svyravimų mechanizmas yra laiko delsa, būdinga būsenos sekai nuo didelio grobio iki didelių plėšrūnų, tada iki mažo grobio ir mažo plėšrūno, iki didelio grobio ir pan.
5) PLĖŠRUSIŲ IR grobio POPULIACINĖS STRATEGIJOS
Santykiai „plėšrūnas – grobis“ yra medžiagos ir energijos perdavimo procese iš fitofagų į zoofagus arba iš žemesnės eilės plėšrūnų į aukštesnės eilės plėšrūnus. Autorius šių santykių pobūdis išskiria tris plėšrūnų variantus:
bet) kolekcininkai. Predator renka mažas, gana daug judančių aukų. Toks plėšrumo variantas būdingas daugeliui paukščių rūšių (ploteriams, kikiliams, dygioms ir kt.), kurie energiją eikvoja tik grobio paieškai;
b) tikri plėšrūnai. Plėšrūnas persekioja ir žudo grobį;
in) ganyklos. Šie plėšrūnai grobį naudoja pakartotinai, pavyzdžiui, arklius ar arklius.
Plėšrūnų maisto gavimo strategija siekiama užtikrinti mitybos energinį efektyvumą: energijos suvartojimas maistui gauti turi būti mažesnis nei energija, gaunama jį asimiliuojant.
Tikri plėšrūnai yra skirstomi į
„javapjovės“, mintančios gausiais ištekliais (n, planktoninės žuvys ir net baliniai banginiai), ir „medžiotojai“, kurie gauna mažiau maisto. Savo ruožtu
„medžiotojai“ skirstomi į „pasalą“, laukiančią grobio (pavyzdžiui, lydekos, vanago, katės, mantija), „ieškotojus“ (vabzdžiaėdžius paukščius) ir „persekiotojus“. Pastarajai grupei maisto paieška nereikalauja daug energijos, tačiau jos reikia nemažai, kad suvaldytų grobį (liūtus savanose). Tačiau kai kurie plėšrūnai gali derinti skirtingų medžioklės variantų strategijos elementus.
Kaip ir „fitofago ir augalo“ santykio atveju, gamtoje nepastebima situacija, kai visas aukas suvalgys plėšrūnai, o tai galiausiai lems jų mirtį. ekologinė pusiausvyra tarp plėšrūnų ir grobio palaikoma specialiais mechanizmais kurios sumažina visiško aukų sunaikinimo riziką. Taip, aukos gali:
Bėk nuo plėšrūno. Tokiu atveju dėl adaptacijų padidėja ir aukų, ir plėšrūnų mobilumas, o tai ypač būdinga stepių gyvūnams, kurie neturi kur pasislėpti nuo persekiotojų;
Įsigykite apsauginę spalvą („apsimesti“ kaip lapai ar mazgai) arba, priešingai, ryškią spalvą N .: raudona, įspėjanti plėšrūną apie kartaus skonio. Gerai žinoma, kad kiškio spalva keičiasi skirtingu metų laiku, todėl vasarą jis gali maskuotis žolėje, o žiemą – balto sniego fone. Adaptyvus spalvos pokytis gali atsirasti skirtingose ontogenezės stadijose: ruonių jaunikliai yra balti (sniego spalva), o suaugusieji yra juodi (uolėtos pakrantės spalva);
Pasiskirstyti grupėmis, todėl jų paieška ir plėšrūno žvejyba sunaudoja daug energijos;
Pasislėpti prieglaudose;
Pereinama prie aktyvios gynybos priemonių (žolėdžiai su ragais, dygliuotos žuvys), kartais jungtinis (muskuso jaučiai gali imtis „visapusės gynybos“ nuo vilkų ir kt.).
Savo ruožtu plėšrūnai lavina ne tik gebėjimą greitai persekioti aukas, bet ir uoslę, kuri leidžia pagal kvapą nustatyti aukos vietą. Daugelis plėšrūnų rūšių drasko savo aukų (lapių, vilkų) skyles.
Tuo pačiu metu jie patys daro viską, kad neatskleistų savo buvimo. Tai paaiškina mažų kačių švarą, kurios daug laiko praleidžia tualete ir užkasa ekskrementus, kad pašalintų kvapą. Plėšrūnai apsirengia „maskuojančiais drabužiais“ (lydekų ir ešerių juostelėmis, dėl kurių jie tampa mažiau matomi makrofitų tankmėje, tigrų dryžuotumas ir kt.).
Visiška visų grobio gyvūnų populiacijų individų apsauga nuo plėšrūnų taip pat neįvyksta, nes tai sukeltų ne tik badaujančių plėšrūnų mirtį, bet galiausiai ir grobio populiacijų katastrofą. Tuo pačiu metu, nesant arba sumažėjus plėšrūnų populiacijos tankiui, pablogėja grobio populiacijos genofondas (lieka sergantys ir seni gyvūnai), o dėl staigaus jų skaičiaus padidėjimo kenkia maisto bazė.
Dėl šios priežasties grobio ir plėšrūnų populiacijų skaičiaus priklausomybės efektas – grobio populiacijos pulsavimas, po kurio su tam tikru uždelsimu pulsuoja plėšrūnų populiacijos skaičius („Lotka-Volterra efektas“). ) – stebimas retai.
Nustatytas gana stabilus plėšrūnų ir grobio biomasės santykis. Taigi, R. Ricklefsas cituoja duomenis, kad plėšrūnų ir grobio biomasės santykis svyruoja nuo 1:150 iki 1:300. Įvairiose JAV vidutinio klimato juostos ekosistemose vienam vilkui tenka 300 mažų baltauodegių elnių (sveria 60 kg), 100 didelių briedžių elnių (sveria 300 kg) arba 30 briedžių (svoris 350). Toks pat modelis buvo rastas savanose.
Intensyviai eksploatuodami fitofagų populiacijas, žmonės plėšrūnus dažnai išskiria iš ekosistemų (pavyzdžiui, JK yra stirnų ir elnių, bet vilkų nėra, dirbtinuose rezervuaruose, kur veisiasi karpiai ir kitos tvenkinių žuvys, lydekų nėra). Šiuo atveju plėšrūno vaidmenį atlieka pats žmogus, pašalindamas dalį fitofagų populiacijos individų.
Ypatingas plėšrumo variantas stebimas augaluose ir grybuose. Augalų karalystėje yra apie 500 rūšių, kurios proteolitinių fermentų pagalba gali gaudyti vabzdžius ir iš dalies juos suvirškinti. Plėšrieji grybai sudaro gaudymo įtaisus mažų ovalių arba sferinių galvų pavidalu, esančiais ant trumpų grybienos šakelių. Tačiau labiausiai paplitęs spąstų tipas yra lipnūs trimačiai tinklai, susidedantys iš daugybės žiedų, susidarančių išsišakojus hifams. Plėšrūs grybai gali sugauti gana didelius gyvūnus, tokius kaip apvaliosios kirmėlės. Kirminui įsipainiojus į hifus, jie auga gyvūno kūno viduje ir greitai jį užpildo.
1.Pastovus ir palankus temperatūros ir drėgmės lygis.
2. Maisto gausa.
3. Apsauga nuo nepalankių veiksnių.
4. Agresyvi cheminė aplinkos sudėtis (virškinimo sultys).
1. Dviejų buveinių buvimas: pirmosios eilės aplinka – šeimininkas, antros eilės aplinka – išorinė aplinka.